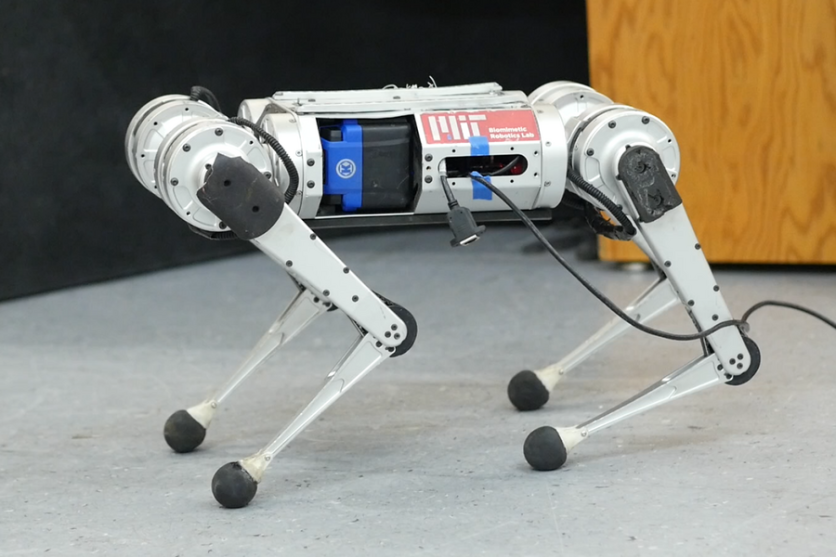
虽然几乎没有保持usain螺栓速度,但麻省理工学院的仿生实验室最近超过了机器人迷你猎豹。
但是,值得注意的是麻省理工学院研究人员没有教或编程此机器人走路或跑步。实际上,机器人是盲人。
但是在短短三个小时内,机器人的猎豹就可以自学如何行走!
怎么可能?
首先报道福布斯,制作自学成才的机器人的关键是将人类从大部分过程中删除。此外,它需要进行全面的模拟。
习惯检查实际系统并手动创建模型作为教机器人的过程的一部分。麻省理工学院教授Pulkit Agrawal在向《福布斯》的一份声明中指出,尽管此程序是良好且已建立的,但“不是很可扩展”。
根据Agrawal的说法,传统的机器人培训至少需要100天的剧烈工作。这是工程师和计算机科学家创造行为的实际人类时间,并为机器人完成了数月的反复学习学习。
减少到三个小时,必须改变方法论,也需要大量使用模拟器。Nvidia和其他合作伙伴的技术。采用这种方法需要远离指导机器人的行动,而不是赋予其创建其行为的自由。
根据Agrawal的说法,摆脱人类创造者将花费时间和金钱。试验和错误学习对于降低这一成本是必要的,但是需要更多数据。
结果,模拟器提供了一个安全的游乐场,机器人可以在其中绊倒。但是,正如Agrawal指出的那样,模拟器也可以比现实生活更快地移动。
然后,该项目的钥匙是模拟的,并且能够犯错而不会产生任何影响。
根据麻省理工学院的说法,该团队创建了一种通过模拟体验来改善机器人行为的方法。事实证明,这对于在实际世界中成功应用教导的行为至关重要。
因此,迷你猎豹现在可以以与人类能力相当的速度运行,每秒约四米,即每小时9英里。
如果机器人是盲人,它如何移动?
即使看起来可能并不快,它也是该特定机器人的记录。它仅重约20磅,高约一英尺。
麻省理工学院Gabriel Margolis的研究生断言,增加其规模也将提高其速度。这意味着他们可以击败Usain Bolt。
机器人通过移动关节而不是使用触摸传感器来感知其周围环境,而触摸传感器也没有触摸传感器来感知其周围环境。
这被称为“本体感受”,也称为运动学。这是感知四肢的位置和运动的能力,而无需查看它们。
然后,猎豹可以确定其在哪种表面上,并相应地调整其运动方式和速率。
麻省理工学院对腿部机器人的研究公开可用,这对于任何可能希望利用它的人来说都是一个很好的消息。根据Agrawal的说法,该代码可以作为开源项目访问,允许任何人下载它,进行实验并重现结果。
本文由技术时报拥有
由华金·维克多·塔克拉(Joaquin Victor Tacla)撰写