雖然幾乎沒有保持usain螺栓速度,但麻省理工學院的仿生實驗室最近超過了機器人迷你獵豹。
但是,值得注意的是麻省理工學院研究人員沒有教或編程此機器人走路或跑步。實際上,機器人是盲人。
但是在短短三個小時內,機器人的獵豹就可以自學如何行走!
怎麼可能?
首先報導福布斯,製作自學成才的機器人的關鍵是將人類從大部分過程中刪除。此外,它需要進行全面的模擬。
習慣檢查實際系統並手動創建模型作為教機器人的過程的一部分。麻省理工學院教授Pulkit Agrawal在向《福布斯》的一份聲明中指出,儘管此程序是良好且已建立的,但“不是很可擴展”。
根據Agrawal的說法,傳統的機器人培訓至少需要100天的劇烈工作。這是工程師和計算機科學家創造行為的實際人類時間,並為機器人完成了數月的反復學習學習。
減少到三個小時,必須改變方法論,也需要大量使用模擬器。Nvidia和其他合作夥伴的技術。採用這種方法需要遠離指導機器人的行動,而不是賦予其創建其行為的自由。
根據Agrawal的說法,擺脫人類創造者將花費時間和金錢。試驗和錯誤學習對於降低這一成本是必要的,但是需要更多數據。
結果,模擬器提供了一個安全的遊樂場,機器人可以在其中絆倒。但是,正如Agrawal指出的那樣,模擬器也可以比現實生活更快地移動。
然後,該項目的鑰匙是模擬的,並且能夠犯錯而不會產生任何影響。
根據麻省理工學院的說法,該團隊創建了一種通過模擬體驗來改善機器人行為的方法。事實證明,這對於在實際世界中成功應用教導的行為至關重要。
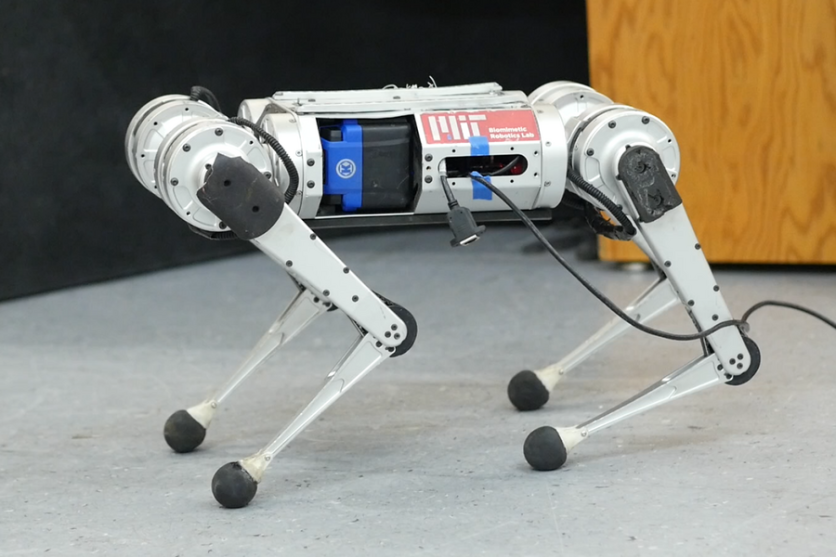
因此,迷你獵豹現在可以以與人類能力相當的速度運行,每秒約四米,即每小時9英里。
如果機器人是盲人,它如何移動?
即使看起來可能並不快,它也是該特定機器人的記錄。它僅重約20磅,高約一英尺。
麻省理工學院Gabriel Margolis的研究生斷言,增加其規模也將提高其速度。這意味著他們可以擊敗Usain Bolt。
機器人通過移動關節而不是使用觸摸傳感器來感知其周圍環境,而觸摸傳感器也沒有觸摸傳感器來感知其周圍環境。
這被稱為“本體感受”,也稱為運動學。這是感知四肢的位置和運動的能力,而無需查看它們。
然後,獵豹可以確定其在哪種表面上,並相應地調整其運動方式和速率。
麻省理工學院對腿部機器人的研究公開可用,這對於任何可能希望利用它的人來說都是一個很好的消息。根據Agrawal的說法,該代碼可以作為開源項目訪問,允許任何人下載它,進行實驗並重現結果。
本文由技術時報擁有
由華金·維克多·塔克拉(Joaquin Victor Tacla)撰寫