就像1990年代恐怖的恐怖片中一样,总部位于中国的惠东大学的研究人员发现了一种不仅让几个不同的无人机自主飞行森林的方式,而且在同时进行完全操作。从表面上看,最终结果似乎相当简单,但是对于那些在项目上献上数年一生的研究人员来说,这是一次山上的攀登。
发表在科学机器人技术研究人员说,日记在5月4日,所有日期都归功于《星球大战:第三集》在报告开幕式的几行中的灵感。因此,郑大学的研究人员着手“向前迈出这样的未来”,如《剑刃跑者2049》,《恩德》和《普罗米修斯》等电影中所代表的。
尽管仅丝毫无人机群并不是什么新鲜事物,但在军国主义环境中最突出的概念中,在研发几年中证明了这一点,但该小组提供的研究在机器人本身之间共享的关系中被证明是开创性的。该小组能够成功地展示一群从字面上自主起作用的无人机群,这意味着一台主计算机一次掌握了每个无人机的重新掌握。
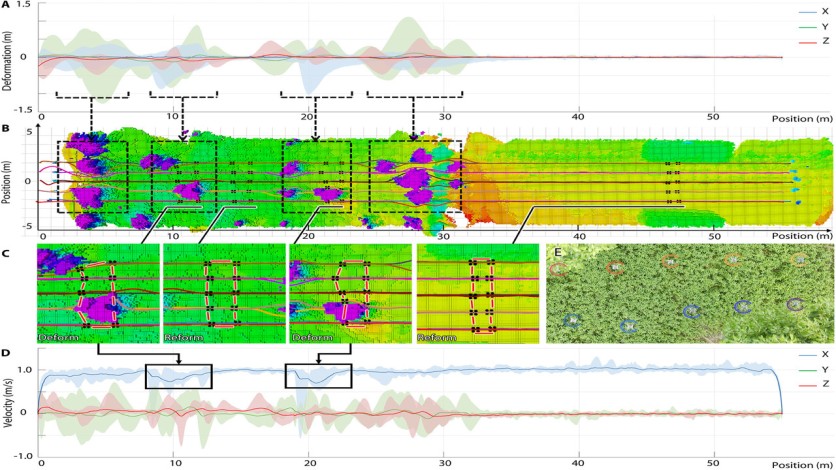
为了测试其创造的可行性,千江大学的研究人员带到了森林,周围茂密的叶子,树木和动物群是其beta跑步的理想缓冲。该团队总共利用了10个机器人,它们很小,可以放在一个人的手掌中,所有这些机器人都结合在一起并录制了相当不可思议的发现,其中最突出的是群落自主飞行林地的能力。
该团队甚至利用了特定的自主无人机编程参数,使调查更加值得,其中一项是赋予无人机群自动驾驶计算机飞行员的“遵循这一人类”任务。这个概念虽然对军事圈子中的人来说最有趣,但可以在特定的灾难性情况下使用,其中急救人员可以将无人机发送以评估该问题。
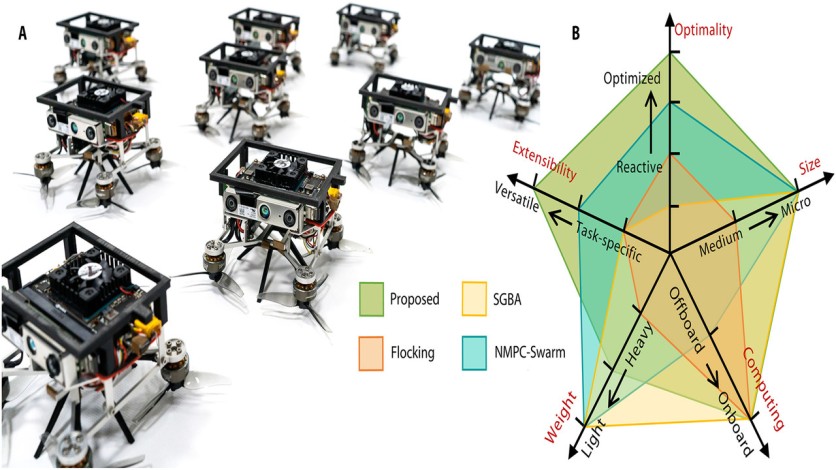
该团队的无人机装有相机,各种传感器和转子叶片,基本上使用尽可能多的现成零件将其拼凑在一起。但是,构建的关键是导航映射工具,使无人机可以将他们看到的东西呈现为完全充实的3D表示,该团队在期刊中具有其特征。
千江大学的无人机主要依靠其传感器来纠正并使他们的完整轨迹成为可能。每个无人机都会共同分享他们共同收集的信息,并在相应地编程时,如前所述,如前所述,如悬停在特定点上或遵循移动对象一样。
尽管对某些人感到恐惧,但对于其他人来说,通过智格大学的团队提供的研究将为未来的研发做出奇迹,以使无人机功能,无人机群和自动驾驶汽车概念的广度。正如研究人员本人所结论的那样:
“此外,提出的多目标轨迹计划者允许高级模块专注于任务抽象,而不必担心常见的要求,例如安全性和动态可行性。”
本文由技术时报拥有
由Ryan Epps撰写