欧洲航天局(ESA)宇航员马库斯·旺德(Marcus Wandt伯特来自国际空间站(ISS)。
这标志着第一次从太空中操纵腿部机器人,这与传统的车轮驱动遥控器不同(通过iflscience)。
表面头像测试
一月份进行的“表面头像”测试旨在在外星环境中推动人类机器人相互作用的边界。
Wandt不仅控制了Bert,还负责其他基于地球的机器人系统,例如DLR的人类机器人服务机器人Rollin'Justin和ESA的Intervort Rover。目标是什么?为了为未来的任务为月球或火星等天体奠定基础,宇航员将指挥各种各样的机器人团队。
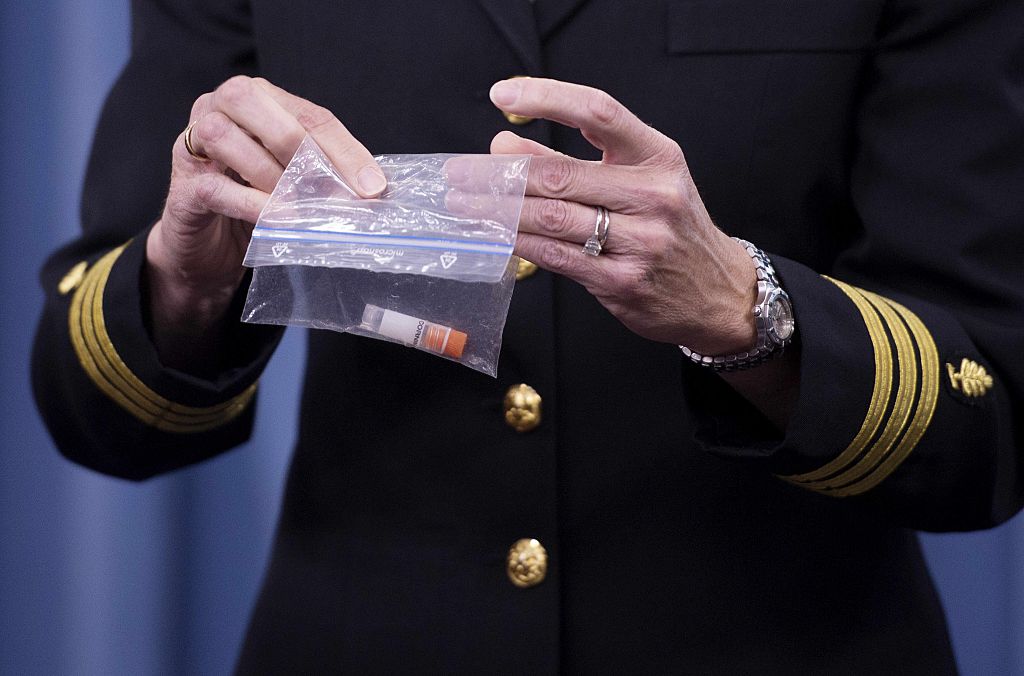
由德国航空航天中心(DLR)开发的伯特(Bert)的腿部设计旨在浏览各种地形,从而可以进入无法进入轮式机器人的区域。在实验过程中,Wandt带领Bert穿过DLR的火星实验室,使机器人可以使用其高级相机眼探索和监视“地形”。
该测试还证明了不同机器人之间的合作。 Rollin'Ustin和Roots Rover都具有独特的能力,合作安装了一条短管,该管道代表了科学测量设备。在机器人团队合作的复杂世界中,这是向前迈出的重要一步,它表明了多个机器人在居署建设等任务上进行协作的能力。
DLR强调合作的挑战,并指出:“即使在人类之间,合作也很复杂。必须达成协议和相互理解。这是一个特别的挑战,当不同的机器人必须组成一个团队并将任务完成。”
遥控的火星机器人
从太空中控制机器人的新颖性,整体视野令人信服。 DLR机器人和机电一体化学院主任Alin Albu-Schäffer看到了一个未来,“月球和火星上的站点,包括宇航员栖息地在内,将由在Astronauts的指导下运营的机器人建造和维护”。
该团队的最新控制和AI算法允许单个宇航员指挥整个机器人团队,这代表了太空探索的范式变化。
这 ”表面头像“实验是由DLR机器人和机电一体化研究所领导的更大计划的一部分,与欧洲航天局(ESA)和德国航天运营中心(GSOC)合作。
这与开发创新技术的持续努力是一致的,这些技术能够以半自主或完全自主的方式对多个机器人进行精确控制,以供将来的勘探任务。
保持在Tech Times。