對於機器而言,從一個地形到另一個地形的過渡並不容易。環境的變化可能會影響其功能,因此其部分應完全適合不同的情況。
變形機器人可以在不同的環境下進行調整
例如,機器人將在不適合它的地方很難運行。但是,一個新的機器人可以通過其形狀變動機制產生很大的變化。
形狀移動機器人
作為人類,我們的調整比機器人容易。我們可以走路,然後立即轉向游泳。但是,就對人類危險的任務而言,機器人被派去去做這樣的工作,例如最近的火星漫遊者勘探。
另一方面,一台機器僅限於其功能,但是通過該機器人,進行了調整,以方便穿越地形變化。
根據下一個網絡,這個想法來自奧斯陸大學的專家。
該團隊提出了一個計劃,以設計一個可以根據環境來修改其身體的創造。該研究發表在自然機器智能。
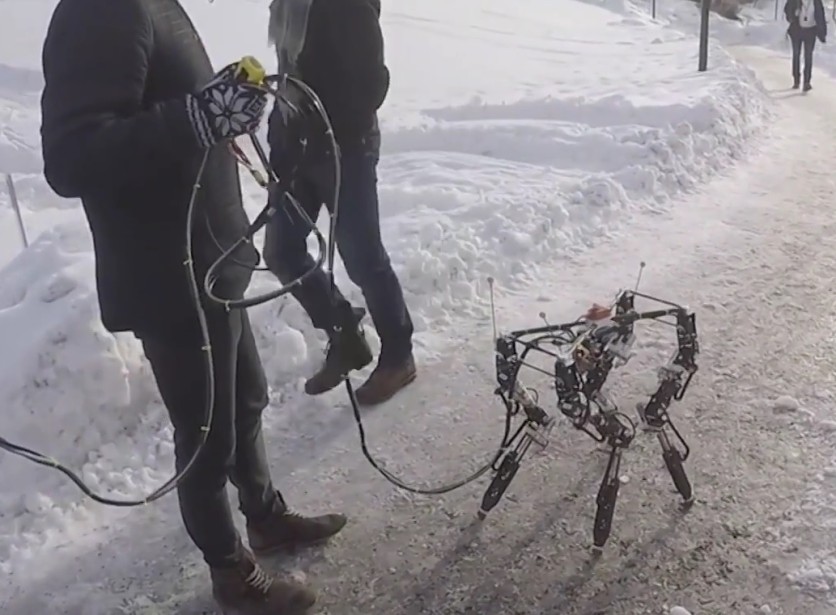
Dyret的創建者或用於體現測試的動態機器人被稱為“動物”。 TønnesNygaard是其方便轉移的想法背後的人。
機器人有四個腿,每個腿的長度與脛骨的長度相同。為了使形狀轉移可能是可能的,電動機已連接到腿上,以便在機器人想要修改其零件時可以調整其長度。
從最初的高度為60厘米,Dyret可以通過電動機高73厘米。 13厘米差異可以為機器人可以做的新事物鋪平很多東西。例如,Dyret的腿較短,但是當它變高時,它的運行速度可能會比以前快。它也可以跳過障礙。
此外,連接到Dyret的傳感器表示它正在踏上什麼。特別是力傳感器,有助於機器人確定地面的硬度。在其前腿之間,一個3D攝像頭捕獲了它的運動,因此可以輕鬆估計地形的狀況。
通過相機及其腳,Dyret可以行走而不會受到任何干擾。當它識別情況會發生變化時,其腿的長度將調整。
另請閱讀:混合機器人現在可以聽到使用Dead Locust的耳朵聽到的聲音,可以解釋聲音
兩項測試以確定形狀變動機器人如何調整到情況
您是否想知道對機器人環境的認可是如何工作的?已經進行了兩次測試以回答這個問題,涉及室內光滑的表面和外面的真實表面。
對於測試,指示Dyret在一個5米的盒子內行走,在該盒子中,表面因砂與水泥而異。實驗後,機器人能夠確定其踏上哪個地形,這使其能夠為其修改選擇最佳選擇。
此外,還發現Dyret成功地走了以前旅行的地形。看不見的地形是通過估計將選擇的身體形狀來對機器人調整的圖案的。
另一方面,在室外實驗中已使用了機器學習模型。對於特定地形的粗糙度和硬度的給定變量,決定了腿的最佳配置。
機器人似乎記住了在實驗過程中可以進行的調整,因此其測量調整對於地形將是精確的。
這得出的結論是,每次步行時,迪特在預測方面都在改善。即使在看不見的環境中,這也導致了它的變化。
本文歸Tech Times擁有。
由Joen Coronel撰寫