幕后文章是与国家科学基金会合作提供给生活方面的。
一个人如何设计一个在三个维度上操纵并导航各种地形的机器人?这些是卡内基·梅隆大学(Carnegie Mellon University)试图解决的主要挑战。
大多数现代机器人从固定或移动基础执行功能。移动底座比固定底座扩展了机器人的范围,但是大多数当前机器人设计无法帮助机器人通过三维景观进行操作。
为了使机器人驾驶各种地形,理想情况下,它将使用传感器或激光创建空间的地形图来规划其路径,因为我们使用眼睛和其他感觉进行导航。同样,它将具有内部自由度,以允许许多不同的步态克服其道路上的障碍。一个蛇机器人具有许多自由度,必须在机器人移动之前进行协调。
Choset在国家科学基金会(NSF)上合作授予通过MIT到Designa机器人的Annette“ Peko” Hossoi,不仅了解如何在任何类型的地形上绘制其路径,而且具有许多运动自由度。 Choset认为,对运动的理解的改善对于在具有挑战性的地形中运作的机制至关重要。
Choset的先前1997 NSF职业奖,在基于传感器的地图建设上为高度阐明的机器人建立了他当前研究的框架。基于传感器的探索使机器人可以进入未知环境并构建地图以建立其位置。该研究结合了使用超声传感器来计划两个点之间的路径,以便机器人可以探索未开创的。
Choset说:“这是我们最终解决的其他问题的垫脚石,这使我们能够到达我们今天拥有的蛇机器人。”
Choset首先接触了蛇机器人技术,以及他们作为加州理工学院的研究生的最低侵入性手术和搜救措施的应用。他的顾问乔尔·伯迪克(Joel Burdick)和研究生格雷格·奇里基安(Greg Chirikjian)启动了有关蛇机器人的研究计划。在加州理工学院期间,Choset为该领域做出了贡献,当他成为卡内基·梅隆(Carnegie Mellon)的教职员工时,他带来了研究计划。
Choset的当前蛇机器人非常可操作,灵活,并且可以利用各种动作来向前发展。这些品质使机器人可以穿越可能充满障碍物和碎屑的复杂环境。蛇机器人还可以穿过人和传统机械所无法进行的紧密包装的空间和困难的位置。
除了各种各样的机车外,Choset还增加了传感器,一个相机和光线,以便机器人蛇可以在各种条件下起作用。
Choset说:“我感兴趣的搜救和救援是在狭窄的空间中,例如倒塌的建筑物或我的。我希望有一天我的机器人能够穿越这些领土,而我的机器人将是一种救援人员会随身携带的工具。”
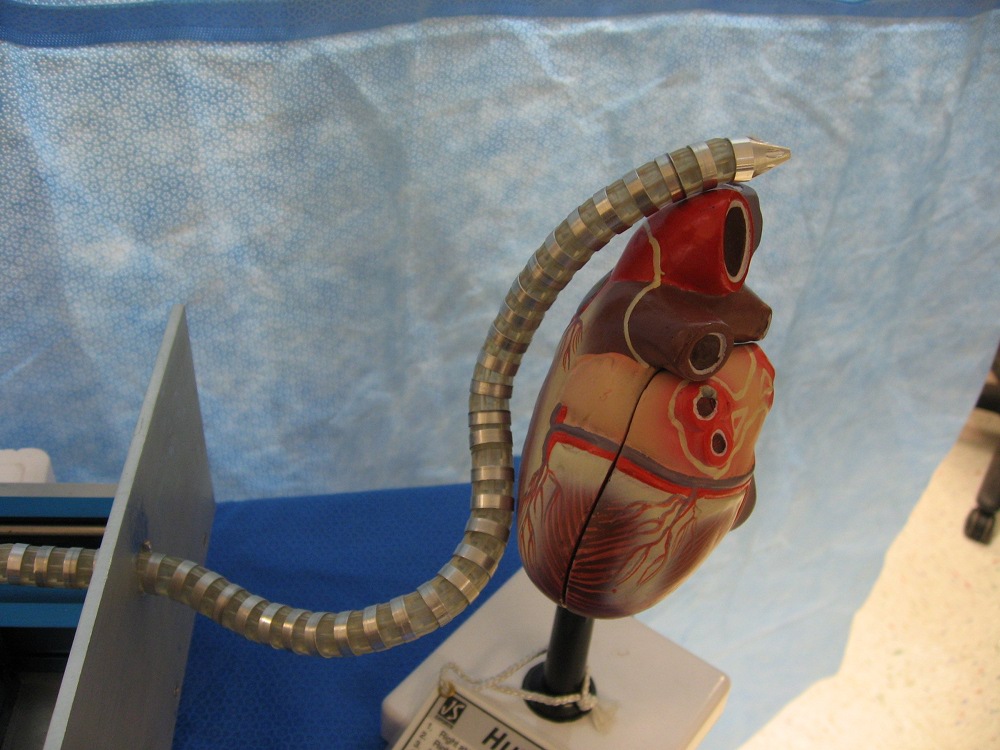
除了应用搜索和救援的应用外,Choset还开发了另一种用于微创心脏手术的蛇机器人,被称为有氧运动。它的直径为0.4英寸(11英里),与开发用于搜救的机车蛇机器人的机制完全不同。
有氧运动是使用计算机和操纵杆控制的,在心脏手术过程中,它通过胸部的一个点进入,并将其包裹在心脏上,直到到达问题区域为止。它的主要目的是寻找和去除受损的组织,并且由于它既灵活又刚性,因此对这种类型的程序可能非常有效。
Choset说:“因此,我们所做的是心脏心脏地图。” “这帮助了病人,因为病人没有让她的胸部开裂。去年2月的手术,如果她以传统的方式完成了胸部,她仍然会因遭受胸口开裂的破坏而恢复。相反,第二天她回家了。”
手术的独特之处在于,心脏病专家执行了手术。过去,只有外科医生会做这种类型的手术,但是手术蛇机器人允许培训较少和资源较少的人成功完成心外膜映射。
除了依靠传感器在空间中导航外,机器人还需要自由地穿过具有挑战性的地形。 Choset和他的研究小组正在开发各种步态,以使蛇机器人能够克服任何障碍。
Choset说:“我的研究小组做出的最大贡献之一就是定义步态。” “步态是一种运动控制器 - 当马踩马,脚踝,膝盖和臀部时,正在采取某种运动来向前推动它。通过一定的速度,当它疾驰时,它仍然具有内部运动,并且它经历的内部运动完全不同,因为它会像前进和跳过障碍物一样。”

蛇机器人与常规机器人不同,因为它们在没有固定底座的情况下移动。从本质上讲,他们要么依靠移动的胎面或皮肤,要么内部形状改变以推动它们向前推动。 Choset的蛇机器人仅依赖内部形状的变化来移动。内部运动和关节角度使Choset的研究小组得以发展许多不同的步态。
Choset和他的同事选择适应几个生物蛇步态的机器人,以便可以应对各种不同的环境。主要步态使蛇能够以线性进展前进,但步态也可以攀升障碍物。侧向是一种生物步态,可导致蛇机器人侧向移动并具有更宽的足迹,从而使蛇在大障碍物上移动。最后,蛇中最常见的运动形式是横向起伏,Choset和他的同事借用了蛇的侧面,以便机器人的水生版本可以游泳。
“我的机器人可以在座椅上游泳,违反篱笆,爬上旗杆,爬过草地,骑在灌木丛上。它可以做很多事情。” Choset说。
Choset最近收到了额外的NSF授予开发一个项目,以在埃及赫尔加达的Mersa/Wadi Gawasis考古遗址中使用机器人探索。这将涉及与波士顿大学的凯瑟琳·巴德(Kathryn Bard)和埃及最高古物委员会的海洋考古学家穆罕默德·阿卜杜勒·马格伊德(Mohamed Abd El-Maguid)的长期合作,他们将使用机器人来检查人们对人们太危险的考古兴趣地区。考古学家希望探索的许多人造洞穴都用来存放古老的船只,这可能具有历史意义。
Choset和他的同事将通过将蛇机器人送入洞穴来识别和取回文物,以协助考古学家。蛇机器人将被用作工具,考古学家将不仅可以用来探索脆弱的历史遗迹,而且可以最大程度地减少任何干扰。
当机器人探索站点时,他们将构建一张地图,提供该位置的三维视图。该地图将允许考古学家和公众实际上参观具有重大国家利益的地点,并有可能开放新申请的机器人技术。
编者注:这项研究得到了国家科学基金会的支持(NSF),联邦机构负责在科学和工程领域的所有领域资助基础研究和教育。本材料中表达的任何观点,发现和结论或建议都是作者的意见,不一定反映了国家科学基金会的观点。看到幕后档案。