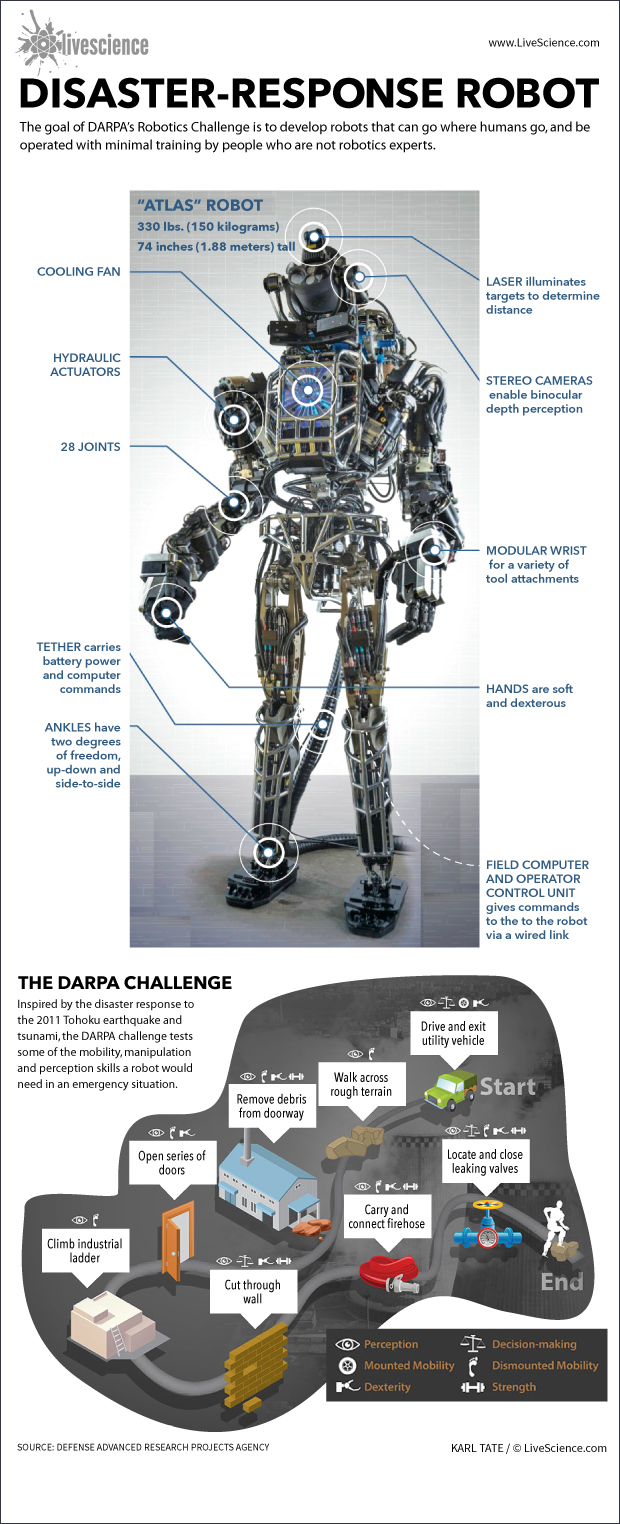
受到对2011年Tohoku地震和海啸的灾难反应的启发,DARPA挑战赛测试了机器人在紧急情况下机器人将需要的一些移动性,操纵和感知技能。
首先,机器人必须驾驶并退出一辆多功能车。然后,他们走过粗糙的地形,从门口清除碎屑。机器人打开了一系列的门,爬上工业梯子并切入墙壁。然后他们携带并连接消防。最后,机器人必须定位并关闭泄漏的阀门。
这些测试检查机器人的感知,流动性,手动敏捷性,决策能力和力量。
要通过测试,机器人必须具有特定的功能。挑战者之一的“地图集”机器人重330磅。 (150公斤),高74英寸(1.88米)。
Atlas的体内有28个关节。四肢是液压作用的。脚踝具有两个自由度,可以向后移动以及上下移动。手腕是模块化的,可以允许各种工具附件。手柔软而灵巧。
在其头上,Atlas携带立体摄像机以实现双眼深度感知。 LIDAR系统会发射激光器以照亮目标以确定距离。
一个系绳将地图集链接到其电池电源和通信系统。操作员可以通过有线链接将命令发送到地图集。