对于机器而言,从一个地形到另一个地形的过渡并不容易。环境的变化可能会影响其功能,因此其部分应完全适合不同的情况。
变形机器人可以在不同的环境下进行调整
例如,机器人将在不适合它的地方很难运行。但是,一个新的机器人可以通过其形状变动机制产生很大的变化。
形状移动机器人
作为人类,我们的调整比机器人容易。我们可以走路,然后立即转向游泳。但是,就对人类危险的任务而言,机器人被派去去做这样的工作,例如最近的火星漫游者勘探。
另一方面,一台机器仅限于其功能,但是通过该机器人,进行了调整,以方便穿越地形变化。
根据下一个网络,这个想法来自奥斯陆大学的专家。
该团队提出了一个计划,以设计一个可以根据环境来修改其身体的创造。该研究发表在自然机器智能。
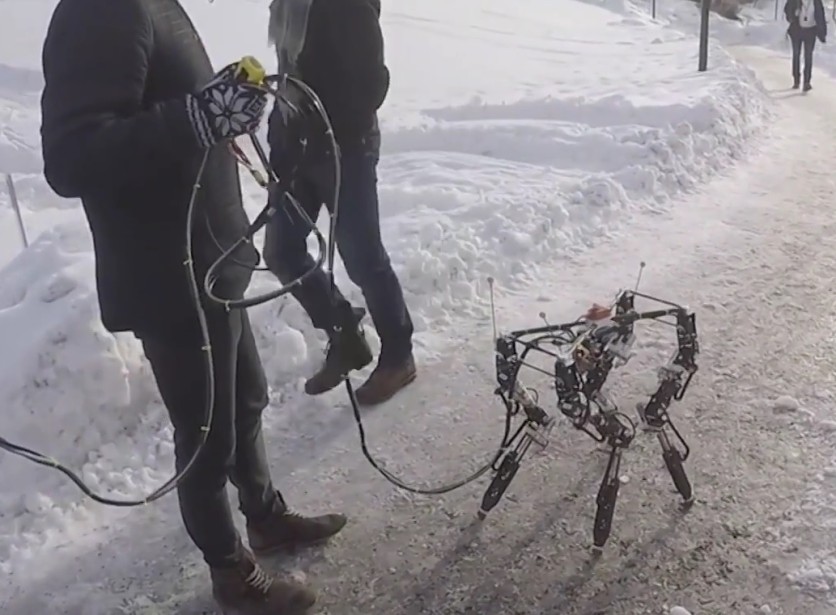
Dyret的创建者或用于体现测试的动态机器人被称为“动物”。 TønnesNygaard是其方便转移的想法背后的人。
机器人有四个腿,每个腿的长度与胫骨的长度相同。为了使形状转移可能是可能的,电动机已连接到腿上,以便在机器人想要修改其零件时可以调整其长度。
从最初的高度为60厘米,Dyret可以通过电动机高73厘米。 13厘米差异可以为机器人可以做的新事物铺平很多东西。例如,Dyret的腿较短,但是当它变高时,它的运行速度可能会比以前快。它也可以跳过障碍。
此外,连接到Dyret的传感器表示它正在踏上什么。特别是力传感器,有助于机器人确定地面的硬度。在其前腿之间,一个3D摄像头捕获了它的运动,因此可以轻松估计地形的状况。
通过相机及其脚,Dyret可以行走而不会受到任何干扰。当它识别情况会发生变化时,其腿的长度将调整。
另请阅读:混合机器人现在可以听到使用Dead Locust的耳朵听到的声音,可以解释声音
两项测试以确定形状变动机器人如何调整到情况
您是否想知道对机器人环境的认可是如何工作的?已经进行了两次测试以回答这个问题,涉及室内光滑的表面和外面的真实表面。
对于测试,指示Dyret在一个5米的盒子内行走,在该盒子中,表面因砂与水泥而异。实验后,机器人能够确定其踏上哪个地形,这使其能够为其修改选择最佳选择。
此外,还发现Dyret成功地走了以前旅行的地形。看不见的地形是通过估计将选择的身体形状来对机器人调整的图案的。
另一方面,在室外实验中已使用了机器学习模型。对于特定地形的粗糙度和硬度的给定变量,决定了腿的最佳配置。
机器人似乎记住了在实验过程中可以进行的调整,因此其测量调整对于地形将是精确的。
这得出的结论是,每次步行时,迪特在预测方面都在改善。即使在看不见的环境中,这也导致了它的变化。
本文归Tech Times拥有。
由Joen Coronel撰写