蟑螂的扁平尸体可以进入没有人所能的地方,而不会留下痕迹。他们几乎可以吃任何东西,他们。
所有这些素质使它们成为搜索和救援操作的理想阶梯,以及其他更有问题的应用程序,例如监视。这就是为什么来自日本大阪大学和印度尼西亚的Diponegoro大学决定幼体蟑螂是个好主意。
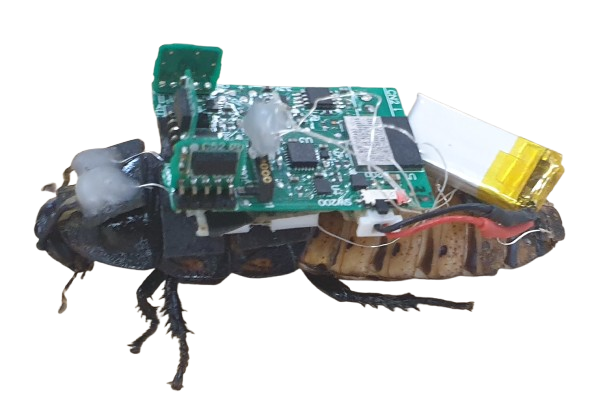
这个概念涉及将两全其美的最好的概念结合在一起:有机蟑螂解剖结构,微调数百万年从高科技背包中进行一些电子播种的人类选择的目标目的地,以导航小空间和敌对环境的发展。
“小规模的机器人的创建是具有挑战性的;我们想通过保持简单来避开这一障碍,”解释Diponegoro大学的机械工程师Mochammad Ariyanto首席作者Mochammad Ariyanto。
“通过简单地将电子设备连接到昆虫上,我们可以避免更精细的机器人工程细节,并专注于实现我们的目标。”
老实说:甚至在运动方面很笨拙。有一个细节我们最好的自动机甚至还没有开始破解。
当涉及垂直导航时,这变得尤为明显:正如所有惠夫人所知道的那样,许多机器人很容易成为通过简单的楼梯撤消。另一方面,蟑螂可以攀登墙壁,缩放周围,穿透管道,甚至耐受低氧环境。
团队没有从头开始,而是想看看马达加斯加是否嘶嘶蟑螂(portentosa gromphorahina)可以安装与sensors检测运动,障碍物,湿度,温度和其他数据,以及可用于引导昆虫的天线和身体上的植入电极。
整个Shebang被称为“基于生物杂交行为的导航(BioBBN)系统”,它基于Ancom-Avoid编程,该编程涉及目标到达设定的位置避免在途中出现的任何障碍。
BioBBN具有两种导航算法:一种用于简单环境,另一个用于更复杂的情况。
“第一个导航系统可以利用较大且较重的电子背包,而第二个则需要更紧凑,更轻的设备来容纳它复杂的地形导航,“作者写。
他们在带有沙子,岩石和木头的障碍赛中测试了生物黑的蟑螂。导航命令很少使用,以确保半机械人达到目标,但是除此之外,当事情变得饱满时,动物大多被允许找到自己的方式,避免或克服障碍并纠正自己。

“这种算法……利用蟑螂的自然行为,例如墙壁的和攀爬,在障碍物上绕过障碍,”作者写。
“由于避免障碍和自然攀爬行为,较密集的第二种情况需要更多的时间。”
作者希望这些虫子可以用来检查战争和自然灾害后剩下的危险瓦砾,甚至发现幸存者和救援人员陷入困境。他们可以在不适合人类的地方发送数据:建筑物的狭窄管道,地下深隧道和敏感的文化遗产地点。该团队还指出了他们在监视中的潜在价值,这是一个更令人震惊的前景。
“我相信,与纯机械机器人相比,我们的机器人昆虫可以以更少的努力和力量实现目标,”说大阪大学的湿机器人工程师Keisuke Morishima。
“我们的自主生物杂交导航系统克服了传统上挑战机器人的问题,例如从跌倒中恢复过来。这是踏入实验室外和进入诸如荒野之类的现实生活的情况所需要的。”
当然,目前尚不清楚蟑螂对所有这一切的感觉。
这项研究发表在软机器人技术。