幕後文章是與國家科學基金會合作提供給生活方面的。
當約翰·施密特(John Schmitt)看著逃離蟑螂時,他看不到疾病或污垢。他看到了完美的跑步機。他說:“無論我能得到它,我都會汲取靈感。”
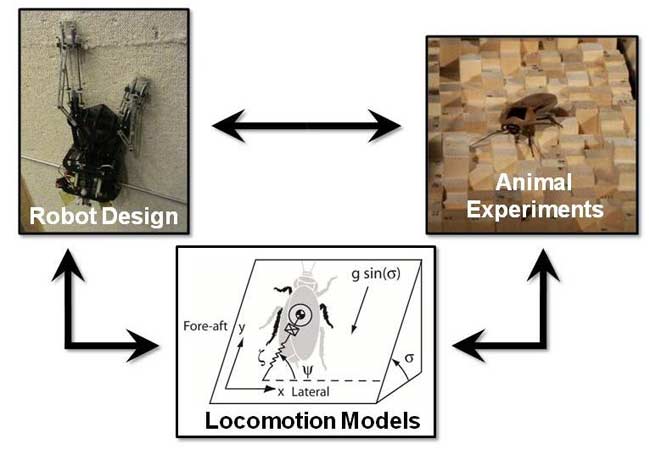
俄勒岡州立大學機械,工業和製造工程學院的助理教授施密特(Schmitt)正在嘗試開發腿部機器人這很容易在最粗糙的表面上運行。他想創建一個可以像蟑螂一樣容易運行幾內亞母雞,兩個似乎可以這樣做的生物,而無需思考,而沒有中斷。
蟑螂帶有寬闊的姿勢和腿部張開的腿,超過臀部高三倍的塊時,只有20%的放慢速度。他說:“他們出色的運動表現與它們的建造方式更多有關,而不是他們的反應方式。”
施密特(Schmitt)和他的同事開發了一種計算機模型,該模型允許運行機器人從地面的變化中恢復幾乎與幾內亞母雞一樣巧妙。
此外,他們正在研究能源存儲與支出,傳感器和反饋要求以及腿部角度的相互作用,以了解從擾動中恢復的恢復 - 那些擾亂運動孔等事件或障礙,例如,他們可以將它們應用於未來的機器人設計。
目的是最終設計真實的東西,一個機器人可以在危險情況下(例如在軍事,執法或太空探索中)覆蓋粗糙的地形。在人類中,知識可能有助於改善假肢設備。施密特說:“希望我們能比現在擁有的設備生產更好的假肢設備。”
在該項目的這個階段,現年36歲的施密特實際上並沒有與昆蟲動手使用。相反,他的作用是開發使用動物作為基礎的計算機運動模型。例如,他開始的想法是,幾內亞母雞在接觸式下改變腿部角度和腿部長度,以從地形的滴落中恢復。
“由於我正在使用的基本的垂直平面運動模型對從蟑螂到人類的廣泛動物有效,因此,我向蟑螂尋求有關腿長在接觸地面上如何變化的想法,以及觸摸往下的腿部角度如何改變對地面高度的響應,對地面高度的變化有所不同。”
他的研究同事,加利福尼亞大學伯克利分校的羅伯特·富爾(Robert Full)直接與蟑螂合作。施密特說:“他的工作集中在檢查蟑螂奔跑時發生的肌肉激活。” “我還沒有機會參觀[Full's Lab]。我確實知道,作為開始的一部分,他經常讓訪客參加他的實驗室。雖然我非常喜歡他們的運行方式,但我可能並不那麼激動。但是,如果有機會,我確定我會的。”
施密特(Schmitt)是密蘇里州克里夫·科爾(Creve Coeur)的本地人,是聖路易斯郊區的,在切斯特菲爾德(Chesterfield)長大,是機械工程師和家庭主婦的四個兒子之一。他畢業於聖路易斯的華盛頓大學,在那裡主修機械工程。他於1996年獲得了華盛頓大學的機械工程學碩士學位,隨後是1999年普林斯頓大學的藝術碩士學位。 2001年,他獲得了普林斯頓大學的機械和航空航天工程學博士學位。
他說:“有一個父親是一名機械工程師,並從事諸如戰鬥機等酷項目的工作無疑是成為機械工程師的靈感。”
他已婚。他說,他的妻子希瑟(Heather)擁有分子生物學博士學位,“目前正試圖確切地弄清楚她在下一階段要做的事情。”
他對科學的興趣源於數學的能力和解決邏輯難題的熱愛。不難看出這些童年的利益如何發展成為工程職業,重點是研究。
他說:“小時候,試圖弄清楚事物的工作原理主要是一個困難的邏輯難題。”將物品拆開並查看各個組件如何合併以生產成品非常有趣。但是,成為工程師需要數學來弄清楚組件為什麼會像它們一樣工作,以及如何利用這些知識來更好地設計它們。 ”
他在他童年時代家附近跑的小溪中發現了最早的機動“模型”。他回憶說:“我總是對水ri蟲和他們在水面上漂浮和脫脂的能力著迷。” “我不知道他們如何能夠保持在水的頂部,並且能夠僅僅通過簡單的運動才能快速移動。僅在過去的幾年中,我們才了解了水剝離者如何利用水錶面張力來有效地越過水面。
他補充說:“就我對運動的興趣而言,這無疑是我想弄清楚簡單的生物生物體能夠執行非凡的壯舉,這在大多數情況下尚未被科學界複製或完全理解的壯舉。” “大自然充滿了這些類型的難題,作為科學家,我們才剛剛開始了解我們對動物和昆蟲如何達到其表現水平的理解的表面。”
編者註:這項研究得到了國家科學基金會(NSF)的支持,該基金會是聯邦機構,並負責在科學和工程領域的所有領域為基礎研究和教育提供資金。本材料中表達的任何觀點,發現和結論或建議都是作者的意見,不一定反映了國家科學基金會的觀點。看到幕後存檔。