研究人員說,一個可以迅速而深入地挖入泥土或濕沙的機器人有一天可以幫助鋪設水下電纜,挖掘並引爆水下礦山或錨固機,或者在海底上。
機器人挖掘機,稱為Roboclam,從大西洋剃須刀的多產挖洞能力中獲取線索(劍直接),在北美大西洋海岸發現了一種大型軟體動物。通過模仿這些蛤s鑽在其沿海棲息地的泥土中,研究人員開發了一台機器,最終可以幫助各種水下任務。
麻省理工學院機械工程學教授阿莫斯·溫特(Amos Winter)說:“當我們啟動該項目時,我們正在尋找一種製造小型,輕巧,低功率的系統來穿越土壤的方法。” “我們認為可能有一種動物弄清楚瞭如何做到這一點。剃刀蛤stuck伸出來,因為它們可以用AA電池的能量在超過一公里的土壤中移動。” [查看Roboclam的視頻這是給出的
大自然的最好
溫特解釋說,大西洋剃須刀蛤lams通過迅速打開和關閉貝殼來挖掘。這種快速運動吸引了水,從而在蛤身體周圍形成了液體般的液體狀材料。這種水性混合物減少了拖動,並有助於蛤從濕沙向下移動。
“關鍵動作是什麼時候蛤像一本書一樣關閉外殼。當發生這種情況時,它減輕了貝殼向土壤上推動的壓力,“溫特告訴了現場科學。”當蛤lam閉上外殼時,人體周圍的清算區域使[該區域]的移動比周圍的靜態土壤更容易。 ”
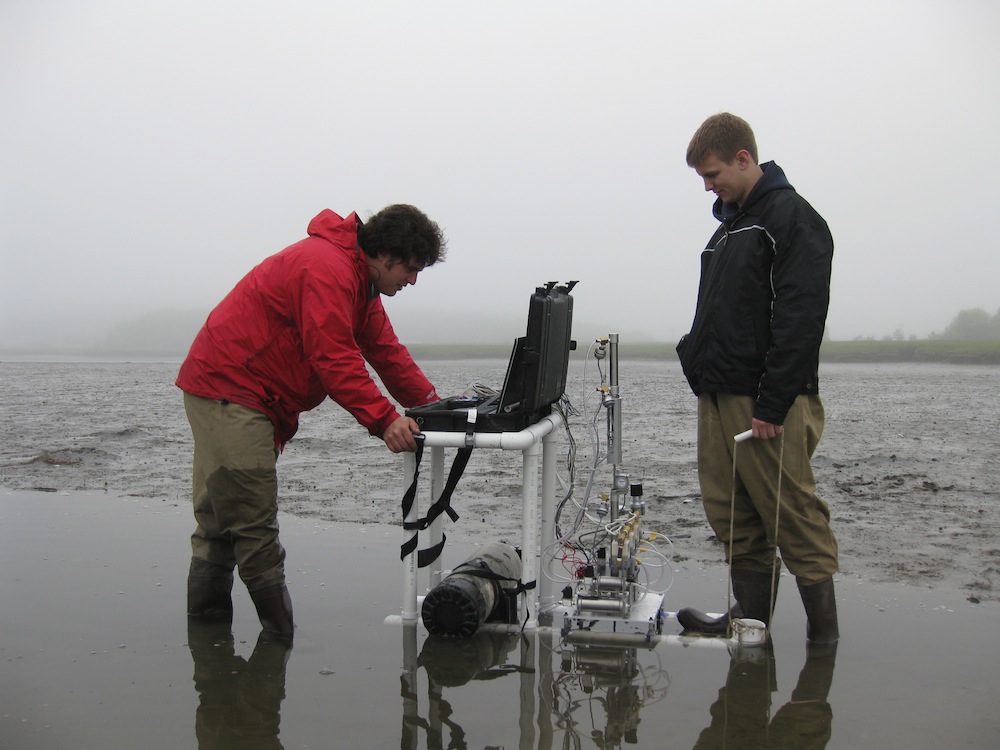
冬季和他的同事們一直在嘗試Roboclam的工作原型。研究人員在他們的實驗室以及馬薩諸塞州格洛斯特海岸的泥石片中的剃須刀自然環境中對挖掘機進行了300多次測試。
工程師發現,Roboclam可以以與真實剃須刀蛤lam相同的速度挖出,平均每秒約0.4英寸(1厘米)。
在試驗中,Roboclam的最大深度近8英寸(20厘米)。溫特說,真正的蛤s可以挖掘到約27.5英寸(70厘米)的深度,但是當前的機器人原型範圍有限,因為它的電動機位於水面上方。
找到最佳位置
溫特說,他“令人驚訝”的是,羅克拉姆可以像啟發它的生物一樣有效地工作。他說,微調機器的過程涉及確定打開和關閉機器人挖掘機“殼”的理想速度。如果貝殼移動得太快,水和沙子沒有混合到適當的流體一致性。如果貝殼的移動太慢,則在蛤lam體周圍倒塌的沙子比其所能處理的要困難,從而難以挖掘。
溫特說:“在那段時間和最小時間之間,有一個甜蜜的地方。”
溫特說,研究人員仍在嘗試Roboclam,併計劃建立另一個可以作為可能在兩到五年內商業上可用的產品的概念驗證模型。
研究人員已經與馬薩諸塞州的公司Bluefin Robotics緊密合作,該公司建立和運營機器人水下車輛用於國防,商業和科學目的。溫特說,機器人可以在當前的一個靜止狀態時錨定藍鰭機器人的車輛。
他補充說:“其他應用程序包括一般錨定,甚至在船上。” “我們還可以使用Roboclam鋪設水下電纜,炸毀水下礦山或在海洋中設置傳感器。”
這項研究今天(4月8日)在網上發表在《生物學和仿生學》雜誌上。
在Twitter上關注Denise Chow@denisechow。遵循現場科學@livescience,,,,Facebook和Google+。原始文章現場科學。