機器人無法做的事情有些事情,但是捕捉飛行對像不再是其中之一。
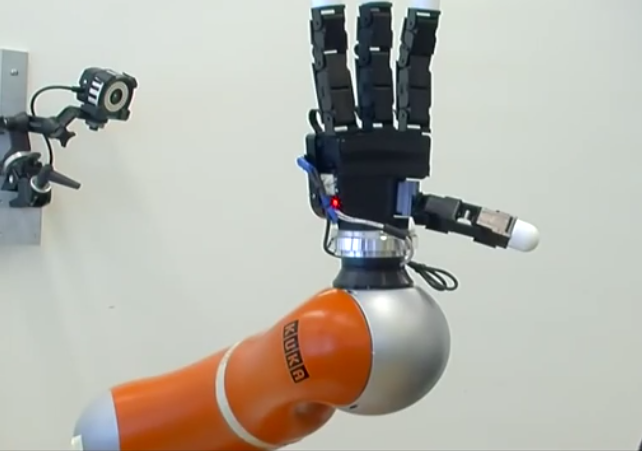
帶有四指三連桿的手,一個新的手機器人研究人員今天(5月12日)在《機器人技術》雜誌上報導,可以在不到五分之一的一秒鐘內抓住球,瓶子或網球球拍。
快速反應的機器人四肢具有許多潛在的應用。他們可能是在衛星上使用清理軌道上的某些空間垃圾,或在汽車上伸出並打破撞擊。
“在我們的日常生活中越來越多地出現,並且用來執行各種任務,機器人將能夠全部捕捉或躲避複雜的物體,”ÉcolePolytechniquefédéralede Lausanne(EPFL)的團隊負責人Aude Billard在一份聲明中說。 [查看機器人在行動中抓手的視頻這是給出的
研究人員說,要捕捉飛行物體,機器人必須對不可預測的事件做出反應,並在很少的時間內整合了幾片信息。如今,許多機器人都具有預編程的行為,並進行計算,使他們在迅速變化的情況(例如捕獲移動的對象)中做出響應時間太長。
為了達到如此快速的回應,研究人員從人類學習方法模仿,以及反複試驗。他們使用了一種稱為“示範編程”的技術,其中沒有給出特定的說明。取而代之的是,研究人員手動將手臂引導到捕獲位置多次,直到機器人學會了自己搬進位置為止。
團隊通過向其扔幾個不同的物體來測試手臂:一個球,一個空瓶,一個半滿的瓶子,錘子和一個網球球拍。這些物體具有不同的重心,對機器人帶來了獨特的挑戰。
在第一個學習階段,研究人員多次向機器人扔東西。機器人使用一系列位於其周圍的相機來測量對象的軌跡,速度和旋轉,以建模其運動。然後,它執行了一個快速的計算,以朝著正確的方向移動,實時糾正其軌跡並同步其手指運動以捕獲對象。
研究人員說,機器人部門已經被用作EPFL清潔我項目的一部分,以開髮用於恢復和處置太空垃圾的技術。
關注Tanya Lewis上嘰嘰喳喳和Google+。跟著我們@livescience,,,,Facebook和Google+。原始文章現場科學。