具有盲洞魚啟發的感覺系統的機器人潛艇可以幫助使機器人更加自主。
儘管機器人可以處理腐蝕性和有毒的氣體,水分,污垢和細菌,但如果事先精確地編程,通常只能做自己的工作。自主機器人另一方面,可以對周圍的環境有些聰明地做出反應,並在很大程度上獨立執行任務 - 或至少這是希望。
自主權的一個關鍵是開發感官系統,使機器人能夠識別他們完成任務的情況。惡劣的環境可以用灰塵或煙霧淹沒傳統的感官,因此可能需要新的感官,包括人們缺乏的感覺,但在動物王國其他地方發現的感覺。
德國慕尼黑科技大學研究人員最喜歡的生物是墨西哥洞穴魚,這是一個亞種阿斯蒂亞納克斯墨西哥。這種地下生物在黑暗中不需要視線,並且隨著眼睛的成熟。
無論如何,它毫無困難地用橫向線條,在鯊魚,其他魚類和一些水生兩棲動物中發現的器官。
側線
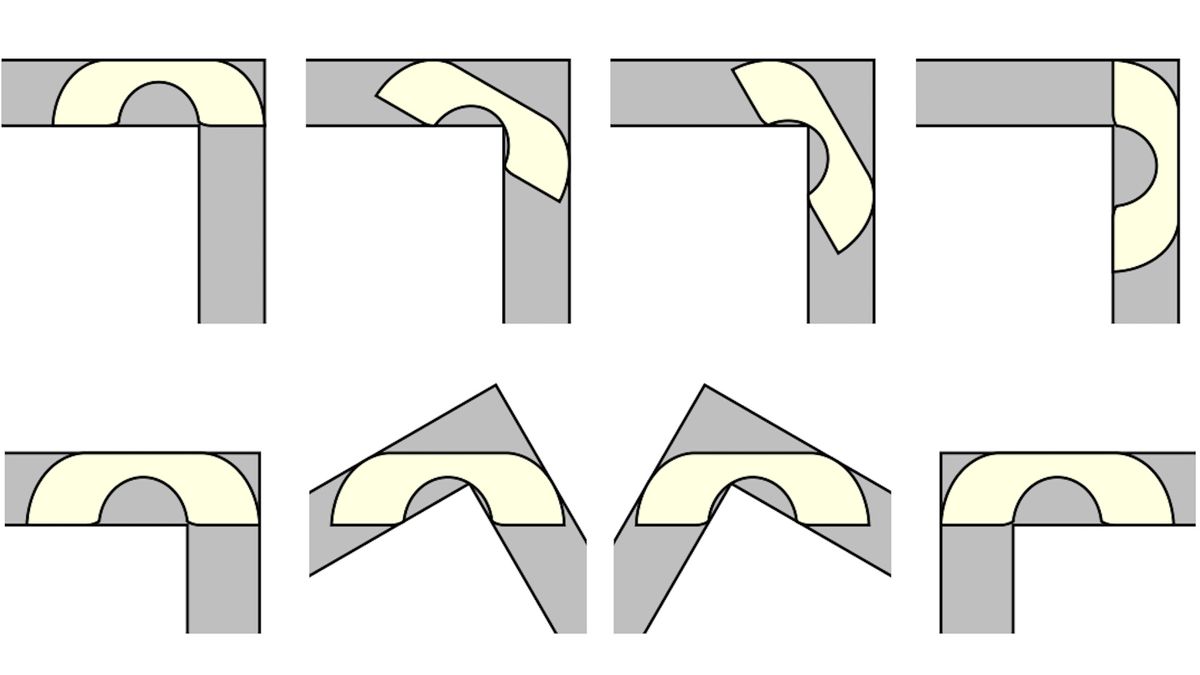
這側線在陸地動物中不存在的,沿著身體的兩側延伸。它由位於皮膚下面的鱗片上或小管上的數百至數千隻細頭髮組成。
它們幫助生物感知水流和壓力的微小變化,從而產生其周圍環境的非常詳細的圖片,即使是在模糊的水中,並且在大約的身體長度上。橫向線系統可用於揭示障礙物在哪裡,危險潛伏和在哪裡找到獵物。
從精確的角度來看,橫向線與人的內耳相當,其中成千上萬的細感頭髮使我們能夠區分聲音。例如,非洲爪子青蛙Xenopus laevis可以使用其橫向線來根據水傳播振動來區分可食用的昆蟲。
人造側線可能對機器人特別有用潛艇,因為水下的可見性通常僅限於幾英寸。紅外探測器土地機器人通常與攝像機一起使用識別其周圍環境的工作也很差,並且機器人可能會用來從水下行駛較差的人提供幫助的任何無線通信。
慕尼黑科技大學的電氣工程師Stefan Sosnowski說:“水下機器人本身就是火星上的車輛。”
斯諾基
現在,研究人員已經開發了一種以一種獨特的側向線的鱸魚命名的“ Snookie”的實驗性水下機器人,該機器人的側向線可以在模糊的水域中定向,其人工感覺器官受到橫向線的啟發。
由塑料和鋁製成的機器人長約32英寸,寬12英寸。它有六個螺旋槳來幫助驅動和定位它,並引導傳感器包裝到圓形的黃色鼻子中。
研究人員J. Leo Van Hemmen說:“ Snookie必須經過足夠小的設計,以便可以輕鬆處理它,並且可以在較小的空間中運行,但足夠大,以至於所有電子產品和電源都適合它。”
同樣在慕尼黑大學的生物物理學家Jan-Moritz Franosch,他的學生幫助開發了人造的側麵線,使其能夠檢測到水中的障礙物和動作,在其鼻子前和任何一側都有手的寬度。以十分之一的時間間隔,僅使用少量的電能,系統中的電子傳感器可以檢測到速度波動不到百分之一。
弗拉諾施說:“沒有速度傳感器可符合我們需求的速度傳感器。” “因此,儘管存在原型,但我們仍在構建傳感器。”
但是,該系統的複雜部分並不涉及感知環境,而是處理這些信號以創建周圍區域的完整圖片。與光波相比,壓力的差異更難準確地固定。 Van Hemmen和他的同事正在研究算法動物與動物進行連線,以分析其環境並開發硬件和軟件,以使機器人模仿它們。
從海到下水道
關於Snookie的研究可能會導致自主水下機器人進行廣泛的操作。在深海中,他們可以調查沉船並在空氣災難發生後找到飛行記錄儀。更明顯的是,他們還可以檢查坦克和下水道管。
範·漢門(Van Hemmen)說:“斯諾克(Snookies)也可以陪伴潛水員作為安全的合作夥伴 - 攜帶備用壓縮氣瓶,或通過額外的設備為潛水員提供支持。”
範·漢門(Van Hemmen)指出,甚至更敏感的側線甚至可以在陸地上找到用途,為激光掃描儀陸地機器人提供了更便宜的替代品,目前用來在周圍的周圍環境中感覺到自己的道路。
與激光掃描儀不同,側線不會盲目其他機器人。結果,“許多小型斯諾克可以在群中運作,並在共同的努力中自主探索他們的環境,”範·漢門說。