蟑螂的扁平屍體可以進入沒有人所能的地方,而不會留下痕跡。他們幾乎可以吃任何東西,他們。
所有這些素質使它們成為搜索和救援操作的理想階梯,以及其他更有問題的應用程序,例如監視。這就是為什麼來自日本大阪大學和印度尼西亞的Diponegoro大學決定幼體蟑螂是個好主意。
這個概念涉及將兩全其美的最好的概念結合在一起:有機蟑螂解剖結構,微調數百萬年從高科技背包中進行一些電子播種的人類選擇的目標目的地,以導航小空間和敵對環境的發展。
“小規模的機器人的創建是具有挑戰性的;我們想通過保持簡單來避開這一障礙,”解釋Diponegoro大學的機械工程師Mochammad Ariyanto首席作者Mochammad Ariyanto。
“通過簡單地將電子設備連接到昆蟲上,我們可以避免更精細的機器人工程細節,並專注於實現我們的目標。”
老實說:甚至在運動方面很笨拙。有一個細節我們最好的自動機甚至還沒有開始破解。
當涉及垂直導航時,這變得尤為明顯:正如所有惠夫人所知道的那樣,許多機器人很容易成為通過簡單的樓梯撤消。另一方面,蟑螂可以攀登牆壁,縮放周圍,穿透管道,甚至耐受低氧環境。
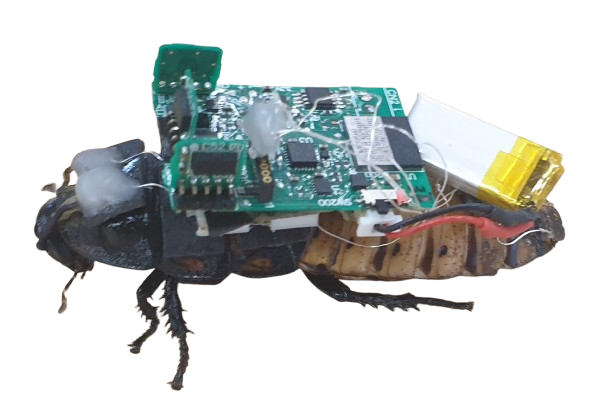
團隊沒有從頭開始,而是想看看馬達加斯加是否嘶嘶蟑螂(portentosa gromphorahina)可以安裝與sensors檢測運動,障礙物,濕度,溫度和其他數據,以及可用於引導昆蟲的天線和身體上的植入電極。
整個Shebang被稱為“基於生物雜交行為的導航(BioBBN)系統”,它基於Ancom-Avoid編程,該編程涉及目標到達設定的位置避免在途中出現的任何障礙。
BioBBN具有兩種導航算法:一種用於簡單環境,另一個用於更複雜的情況。
“第一個導航系統可以利用較大且較重的電子背包,而第二個則需要更緊湊,更輕的設備來容納它複雜的地形導航,“作者寫。
他們在帶有沙子,岩石和木頭的障礙賽中測試了生物黑的蟑螂。導航命令很少使用,以確保半機械人達到目標,但是除此之外,當事情變得飽滿時,動物大多被允許找到自己的方式,避免或克服障礙並糾正自己。

“這種算法……利用蟑螂的自然行為,例如牆壁的和攀爬,在障礙物上繞過障礙,”作者寫。
“由於避免障礙和自然攀爬行為,較密集的第二種情況需要更多的時間。”
作者希望這些蟲子可以用來檢查戰爭和自然災害後剩下的危險瓦礫,甚至發現倖存者和救援人員陷入困境。他們可以在不適合人類的地方發送數據:建築物的狹窄管道,地下深隧道和敏感的文化遺產地點。該團隊還指出了他們在監視中的潛在價值,這是一個更令人震驚的前景。
“我相信,與純機械機器人相比,我們的機器人昆蟲可以以更少的努力和力量實現目標,”說大阪大學的濕機器人工程師Keisuke Morishima。
“我們的自主生物雜交導航系統克服了傳統上挑戰機器人的問題,例如從跌倒中恢復過來。這是踏入實驗室外和進入諸如荒野之類的現實生活的情況所需要的。”
當然,目前尚不清楚蟑螂對所有這一切的感覺。
這項研究發表在軟機器人技術。