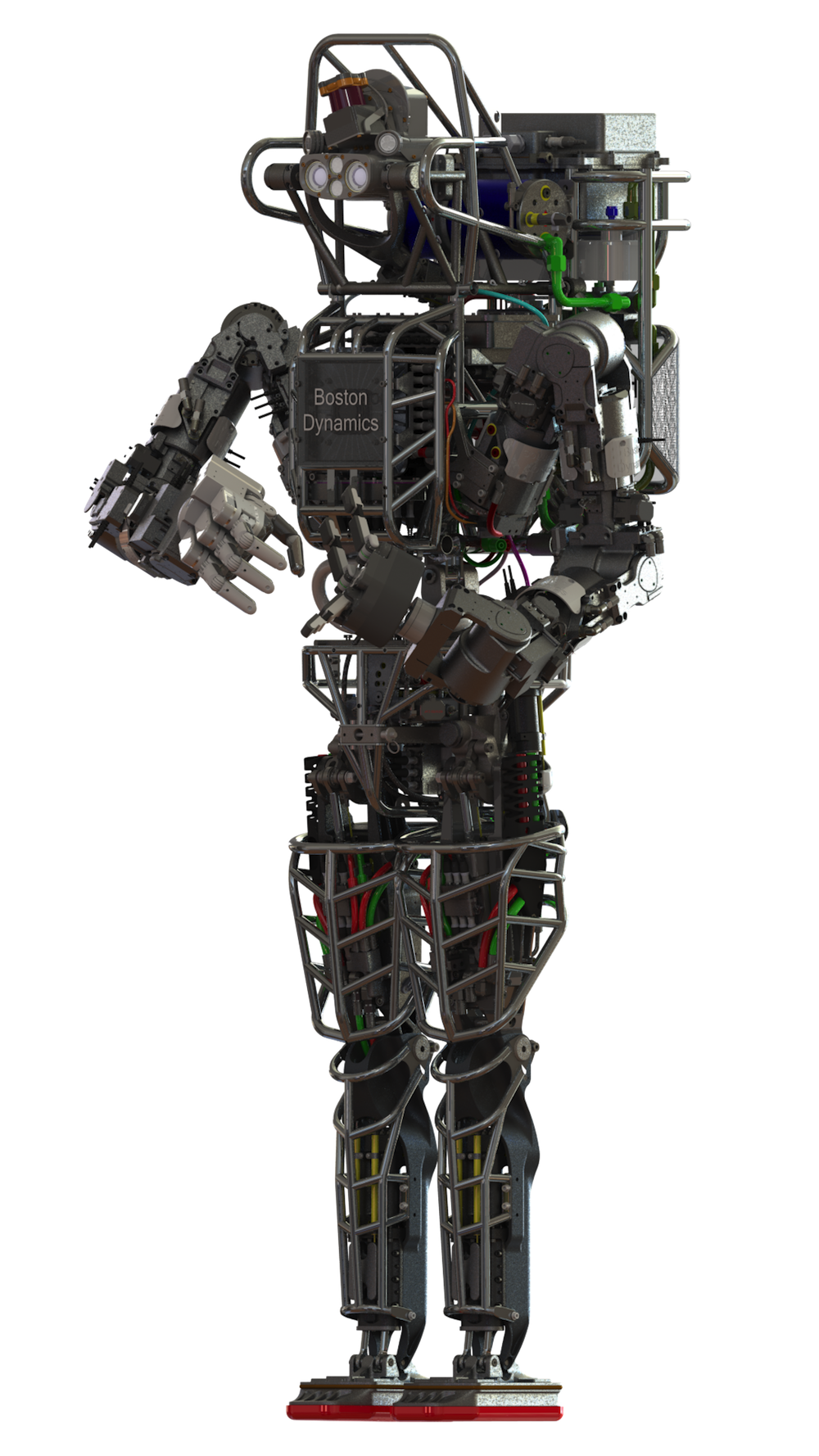
本月初,Google擁有的機器人公司波士頓Dynamics發布了一段視頻,其中涉及森林中的人形機器人機器人。 Robocop型機器人命名為Atlas,嚇壞了一些人,但錄像帶也吸引了一些技術怪胎。
在機器人技術中,一個可以在粗糙的室外地形上運行的機器人很重要,在該領域中,研究人員一直在努力開發能夠在實驗室外移動的機器。波士頓動力學的機器人和地圖集一樣,其他機構的研究人員也在建造在現實世界中可以漫步的機器。
從可以在船隻下游泳的魚啟發的機器人,到可以在山丘上疾馳的犬羊角機,這裡有五個最酷,最有能力的機器人。 [人形機器人飛行汽車:10個最酷的DARPA項目這是給出的
1。 Atlas釋放
雙腿機器人憑藉沉重的軀乾和瘦腿,有點笨拙。如果您需要證明,請查看Blooper捲軸從今年的DARPA機器人挑戰賽(DRC)開始,這是國防高級研究項目局舉辦的人形機器人競賽。
6月參加剛果民主共和國的幾位決賽入圍者使用了Atlas機器人,其中包括位於佛羅里達州的球隊,該隊排名第二,也是馬薩諸塞州理工學院的第六名團隊。波士頓Dynamics的創始人兼前麻省理工學院和卡內基·梅隆大學的前教授馬克·雷伯特(Marc Raibert)表示,儘管阿特拉斯(Atlas)是一個很好的跑步者,但機器人有改進的空間。 (CMU)。
Raibert在Atlas穿過樹林的視頻中說,波士頓動力學工程師正在努力將Atlas脫離其係繩,該繩索將機器人連接到可保持其液壓系統泵送(以及機器人移動)的動力源。機器人的其他電源 - 輕巧的鋰離子電池包裝 - 目前僅持續約一個小時。
2。蛇在平原上

為了建立能夠滑入小空間並在岩石地形上滑行的機器人,CMU的研究人員轉向蛇尋求靈感。
CMU研究人員創建的模塊化蛇機器人可以以人形機器人遇到麻煩的方式移動其身體。他們爬行,爬上,有些甚至可以游泳。但是,直到最近,“蛇機器人”做得很好:爬上沙灘。
2014年,佐治亞理工學院的一組研究人員與CMU的機器人學院合作研究了一項創作非常非常擅長瀏覽桑迪山- 側球響尾蛇(Creamus carstetes) - 並將他們學到的知識應用於CMU的模塊化機器人。這項合作導致了一個蛇機器人,它可以在沙子上滑行,並且可以在污垢上移動。現在,新的和改良的機器人是一個更有前途的機器人,用於未來的搜索和救援任務。
3。男人最好的機器人朋友
那裡有很多機器人可以作為寵物經過,但是一個巨大的160磅。 (73公斤)機械狗?這就是波士頓Dynamics的最新,受犬類風格的機器人的重量。今年早些時候介紹,景點可以上下山上慢跑,穿過樹木,並保持在不平坦的地形上。

機器人有兄弟姐妹。 Spot的大兄弟BigDog是大約240磅。 (109公斤)。另一個波士頓動力學四足機器人LS3機器人與BigDog一樣大,但它更快,更安靜,使其成為士兵和其他需要謹慎的機械“寵物”以攜帶裝備的工具。
LS3機器人的開發由DARPA和美國海軍陸戰隊資助,機器人具有一些友好的戰鬥功能。一方面,狗機器人不需要駕駛員;它會自動使用車載計算機視覺系統遵循其領導者。能夠將多達400磅的拖運。 (180公斤)一次,該機器人也可以在沒有護送的情況下將其發送到場地。 LS3使用內部GP和地形感應技術找到了自己的方式。
4。機械小貓

說到寵物,貓愛好者不必因明顯缺乏貓啟發的機器人而忽視。那裡有幾個貓般的機器人,它們都有特殊的技能。
波士頓Dynamics的Cheetah是世界上禁食的機器人 - 它可以以跑步機的速度達到29英里/小時(47 km/h)。這個遠程動力的機器人從未在戶外證明自己。然而,表弟慢,野貓能夠駕駛戶外地形。 Wildcat專為DARPA的最大移動性操縱(M3)計劃而創建,設計為敏捷和靈活,以幫助士兵擁有廣泛的任務。

麻省理工學院還為DARPA的M3程序設計了一個機器人,該機器人的速度可以達到10 mph(16 km/h)。麻省理工學院的Cheetah機器人可以越過障礙並且不需要係繩才能保持直立。
5。未來派魚
另一個麻省理工學院的機器人在2014年揮舞著展示了游泳技能在在線視頻中。自主機器人的自動機器人非常靈活且快速,設計為像真正的魚一樣游泳,使其能夠打開一角錢。對於該機器人來說,模仿魚是很重要的,因為它是為浸潤的魚類流派並收集可以帶回研究人員的環境數據的。
機器人魚成功的一部分是其柔軟的身體,它模仿了細骨魚的解剖結構。其他水下機器人,例如哈佛大學章魚風格的機器人,進一步採取此設計。哈佛大學的機器人由彈性塑料和橡膠矽樹脂製成,並得益於通過人造四肢泵送的壓縮空氣來保持其形狀。 “ Octobot”的柔軟結構使它們非常適合游泳到小縫隙中。
關注伊麗莎白·巴勒莫 @Techepalermo。遵循現場科學@livescience,,,,Facebook和Google+。原始文章現場科學。