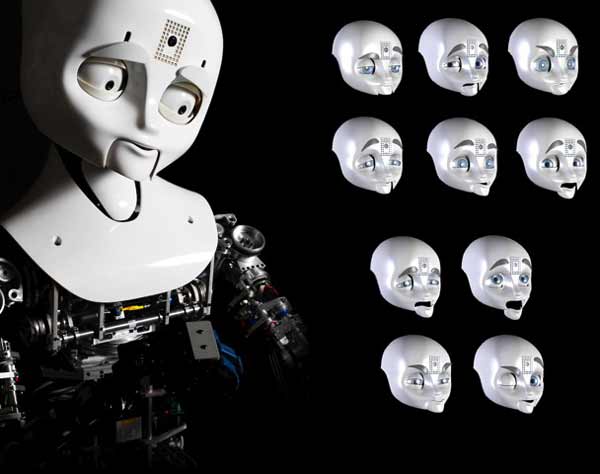
麻省理工學院的Nexi機器人 表達情緒與您相同的方式 - 用高度移動的面孔。
Nexi的頭和臉是由MIT的Xitome設計設計的。富有表現力的機器人始於底部有4個自由度(DOF)的脖子機構,以及頭部本身的泛斜葉。該機制已被構造為計時運動,以模仿人類的速度。
Nexi的臉被設計為使用凝視,眉毛,眼瞼和明確的下頜骨,以傳達更多不同的情緒。
Nexi在每隻眼睛中都有一個顏色CCD,以及(頂部,人類)頭部室內活躍的3D紅外攝像頭和四個麥克風,以支持聲音定位。
這機器人的底盤也是先進的;它基於由感知機器人UMass Amherst實驗室開發的Ubot5移動操縱器。移動底座可以在兩個輪子上動態平衡; Nexi具有類似於Segway的身體。手臂可以拿起十磅。底盤的塑料覆蓋物可以檢測到人類的觸覺。
現在,Nexi需要學會在情感上做出反應,就像Kansei機器人在明治大學的科學技術學院創建。您還應該將Nexi的情感表達與韓國人的情感表達範圍進行比較Ever2-Muse機器人;她有一個更人性化的臉。另外,WD-2臉部變形機器人使用更靈活的面部結構。
看看這個Nexi的視頻表達自己。通過麻省理工學院的Nexi機器人;另請參閱MIT Nexi移動靈巧社交機器人網站。
(這新聞中的科幻小說允許使用的故事Technovelgy.com-科學遇見小說)