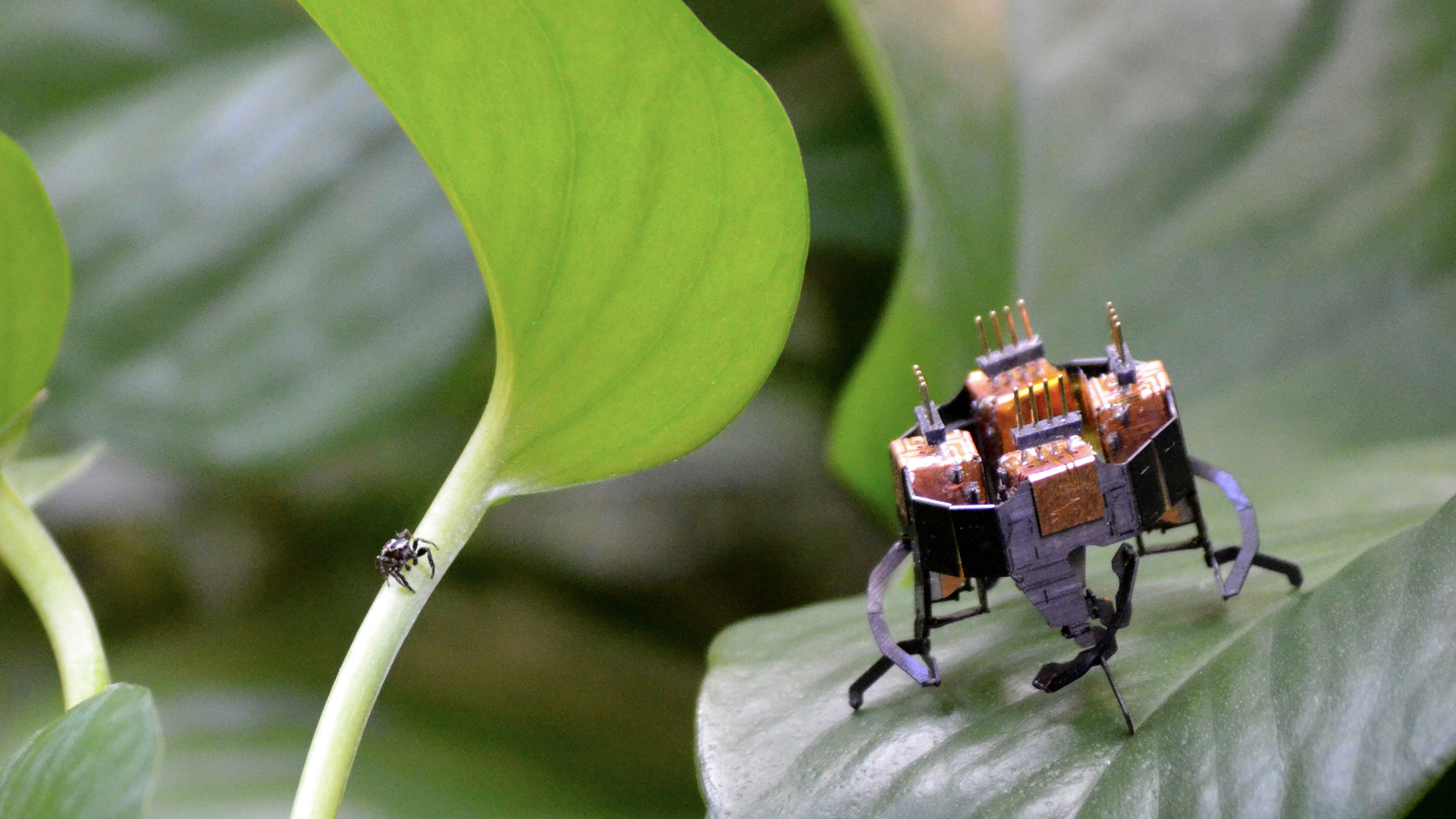
科学家设计了一个微小的变形“蜘蛛机器人”,可以在环境导航时被动操纵其身体。
其发明者说,受蛛网风格的机器人是机器人的先驱,该机器人可能有一天可以通过瓦砾进行手术或狩猎灾区的幸存者。
该机器人被称为“麦克拉里”(McLari)的长度为0.8英寸(2厘米),重量小于0.03盎司(0.97克),可以以每秒2.4英寸的最大速度(每秒6厘米)(每秒6厘米)的最大速度滚动。arxiv。
微型机器人是由同一团队设计的Clari较小,更快的后继者。它还在多个维度上被动地改变其形状以通过间隙拟合。
“由于机器人的尺寸很小和塑造变形的能力,我们设想了这项技术在以下四个社会经济重要性的主要领域中的应用,”研究主管作者Kaushiik Jayaram科罗拉多大学的机械工程教授在一封电子邮件中告诉Live Science。其中包括灾难响应,高价值资产检查,环境监测和精密医学。
相关链接:这个侧向示意的机器人螃蟹是如此小,可以通过针的眼睛。
“从长远来看,我们设想这样的机器人可以有效地通过人体导航并进行自动手术,例如清除动脉堵塞或切除肿瘤。”贾亚拉姆说。
借助麦克拉里(McLari),贾亚拉姆(Jayaram)的团队正靠近创建可以浏览复杂环境的机器人,就像他们受到启发的有机生物一样。
2020年,该团队创建了一个受蟑螂风格的微型机器人Hamr-Jr。
对于蟑螂机器人和新的蜘蛛机器人,该团队都使用折纸样的制造方法将微电机力学成分蚀刻到2D纸上,然后将其弹出以创建3D结构。
McLari机器人有四个腿部模块,可以在两个不同的维度上移动。机器人可以通过向前和左右跑步之间切换在狭窄的空间中,并可以采用多个步态和刺激的速度。
它的腿通过被动关节铰接到身体,这使麦克拉里能够根据遇到的环境改变其体形。例如,它的腿在某些空间中可以伸展到50%。
作为后续工作,科学家希望赋予麦克拉利更多的力量和感应能力。
贾亚拉姆说:“我们也很高兴了解形状变化对增强运动性机动性的影响。”