科学家取得了突破,因为他们成功地发明了可以控制,操纵招标的医学的微型机器人,并且很快就可以用微神经手术来努力治疗,以便努力地到达人体内部的地区。
宾夕法尼亚州立大学对小型生物杂种机器人的新发明没有使用任何形式的“收缩射线”,因为这些机器人尚不存在,而是科学家从其纳米型部门发明的发明,旨在大规模生产和用于革命医学。
研究人员最近发布了最近的突破研究8月26日,星期三,自然杂志标题为“电子整合,大规模制造的微观机器人”。该研究的科学家拥有一项重大创新,使其显微镜纳米机器人与其他纳米机器人不同。
这些机器人是由目前由可以与传统电路合并的电信号控制和操纵的半导体组件制成的。科学家受到挑战,因为在微观系统的执行器系统中缺乏当前的技术,然后他们将为机器人提供动力。
科学家们超越了这项测试,并能够创建一项新技术来支持他们的微观设备。该团队乐观,专注于实际创建其大脑和电池,以用于更复杂的机器人,该版本可以插入体内并用于微观手术。
医疗领域的微型机器人
发生了一些问题,并挑战了团队开发其机器人。他们的主要关注点是能够控制机器人,尽管它的规模尺寸并使其进行竞标。目前,机器和处理器在市场上容易获得的尺寸无法安装。
大多数微观机器人都使用与设计硅成型不兼容的热,光学和声学执行器。因此,科学家促进了新的电压调节电化学执行器的发明,该发明以200微伏和低10纳米瓦的功率运行,该发明适用于机器人的硅处理。
这一发现和发明使他们的研究与其他开发的微观医疗机器人区分开来,因为科学家现在可以控制和运行设备。
海洋执行器
大自然视频通过YouTube屏幕截图
根据逆,该技术称为作者撰写的,称为表面电化学致动器或海洋。海洋可以执行并将能量变成机器人的运动。该设计使微观机器人能够保持可持续性,稳健性和较小的曲率半径。
人体中的微观机器人
大自然视频通过YouTube屏幕截图
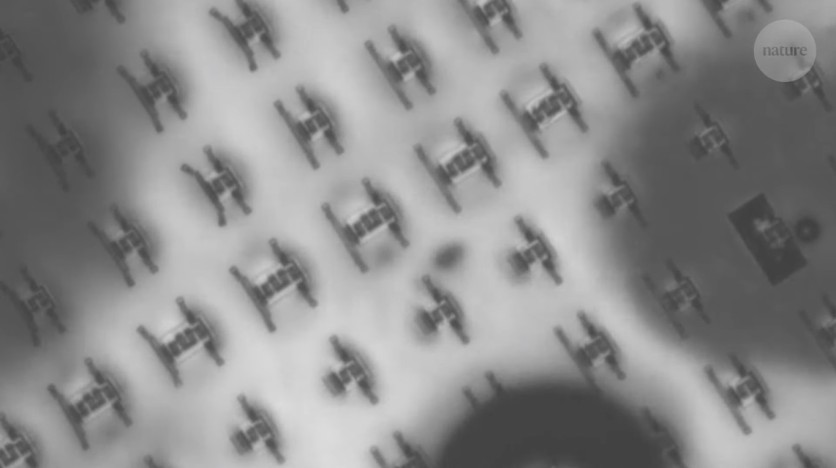
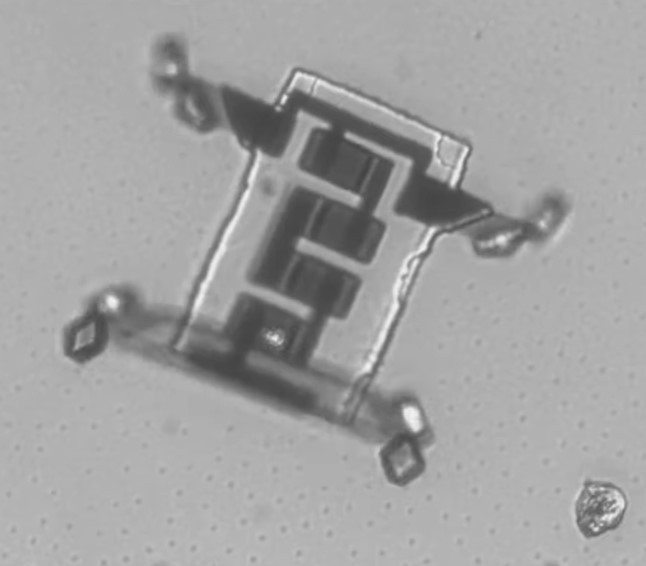
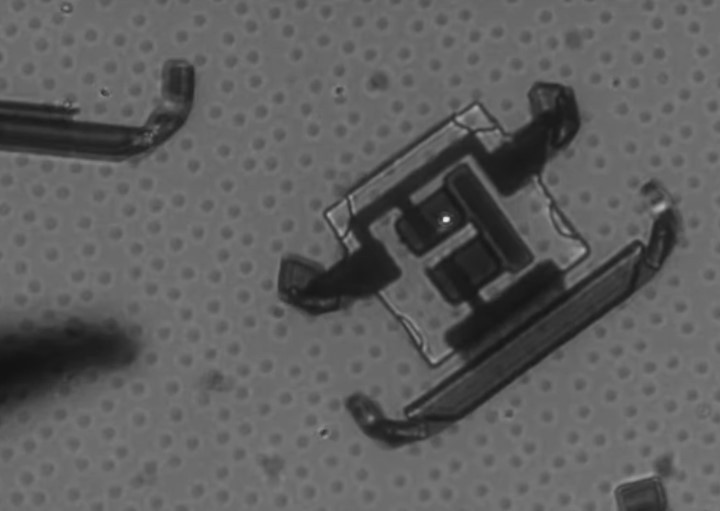
科学家将微观机器人与海洋执行器一起安装,并产生了一个宽0.4 milimmeters和0.7 milimmeters的身体,腿的尺寸约为0.1 milimmeters宽,大约是人头发的大小。
血液中的微型机器人称为木偶,通常被称为木偶,它被弦乐以其运动而扎根;但是,在机器人的情况下,由外部来源控制。科学家创建了一群微观机器人,并使用激光技术对其进行了测试,该技术指向其太阳能电池时控制其运动。前后腿从激光光中吸收离子,从而产生运动。
科学家遵守了五十岁摩尔定律这是关于拥有更先进的技术,因为它扩展到较小的尺寸。当前,微观机器人的设计和活动性很崎roug,但是科学家正在开发它,以便容易用于微型手术。
这些微观机器人将以廉价的生产成本彻底改变医学的能力。
本文由技术时报拥有
由以赛亚·阿隆佐(Isaiah Alonzo)撰写