新研究發現,由肌肉組織提供動力的機器人可以改善工程師為災難救濟操作,勘探或建設設計未來的機器人。
這3D打印伊利諾伊大學烏爾巴納·坎佩恩(Urbana-Champaign)的研究人員創建的“生物 - 機器人”對其運動和更加戲劇性的運動範圍更為精確,因此它可以根據其環境來導航和改變其運動。矩形機器人的長度約為0.2英寸(6毫米),並由柔性的果凍型材料構造,並在任一端裝有兩條工程肌肉組織。
不參與該研究的機器人梅隆大學的機器人教授卡梅爾·馬吉迪(Carmel Majidi)說,這種骨骼肌組織最終可以取代機器人中的傳統電動機。 [有史以來最奇怪的機器人]
“它可以在軟機器人中為四肢創造人造肌肉 - 就像人造水母Majidi告訴Live Science:“基本上,您想要一個更具壽命的機器人,章魚可以用於搜索和救援操作,水下探索,自然災害的救濟 - 我們需要機器人擠入狹窄空間的任何情況。
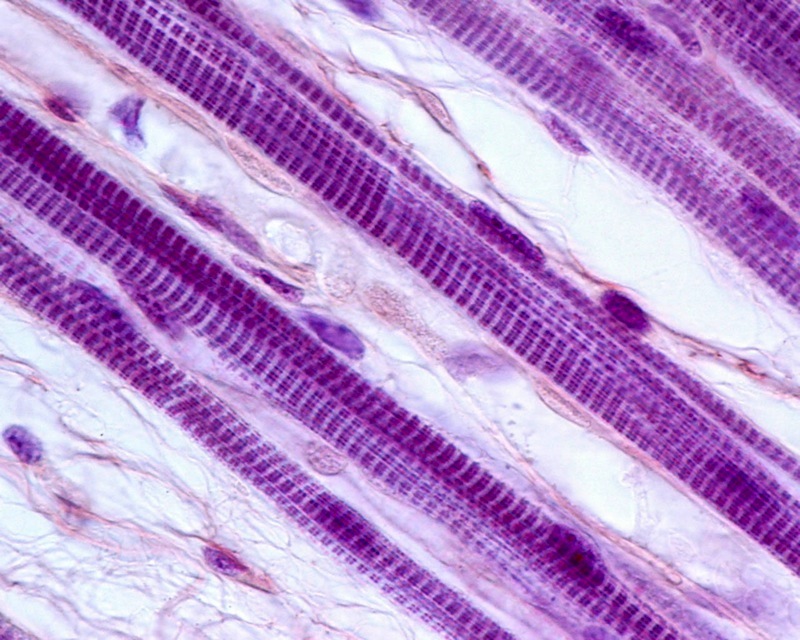
骨骼肌組織是驅動人類運動的原因。它覆蓋骨骼,並由我們可以自覺控制的彈簧肌腱附著。當我們在身體某些部位收縮骨骼肌時,我們會移動 - 無論是跑步時的大腿還是輕微的手指抽動。
研究人員將從小鼠細胞系設計的骨骼肌組織整合到3D打印的軟機器人中。軟機器人- 一種受生物工程中的機器人的靈感,靈感來自海星的強壯結構 - 由柔性而不是剛性材料製成,使其可以在新環境中移動和適應。
通過集成骨骼組織研究人員進入了軟機器人,創建了一台機器,該機器可以執行更複雜的電機任務,並且能夠更自由,動態動態。研究人員說,新的軟機器人將是輕巧的,與生物兼容的,並符合天然肌肉組織的彈性特性。
當科學家測試機器人的運動時,他們發現只有在給予電擊時,生物機器人才會移動 - 與以前用心臟組織設計的生物機器人相比,操作員對運營商的移動有了更多的控制。據研究人員稱,具有心臟組織的機器人連續抽搐,使其難以控制其運動。
如果人類只能在渴望的時候才能控制機器人移動,那麼在敏感或不可預測的工作場景中,機器人將會更好地蓬勃發展。這些機器人可能會模仿我們的身體對我們不斷變化的環境的響應方式 - 無論是躲避出租車還是進入我們向下的狗瑜伽姿勢。
在研究中,研究人員寫道:“基於細胞的軟機器人設備可以改變我們設計機器和系統的能力,這些機器和系統可以動態感知並響應一系列複雜的環境信號。”
Majidi說,這種類型的生物組織與機器人技術的整合可能會導致修復四肢的設計,但這種壯舉仍然遠遠不足以來。 Majidi說:“這仍然是早期的工作,根據我們當前的實際理解/經驗,潛在的優勢是投機性的。” “在組織工程和材料整合中仍有很多工作要做,以真正不受限制且自主的軟生物雜交機器人。”
目前,DARPA對軟機器人用於各種軍事用途,包括其最大的移動性和操縱計劃(M3)計劃於2011年啟動,該計劃正在設計機器人,以協助戰時。
關注吉利安·羅斯·林@Jillroselim和Google+。跟著我們@livescience,,,,Facebook和Google+。原始文章現場科學。