根據一項新研究,受蟑螂啟發的機器人可以利用其身體的形狀,尤其是它們獨特的圓形貝殼(它們獨特的圓形砲彈)來操縱密集的混亂,這可能會使它們在搜索和救援任務,軍事偵察甚至農場中都有用。
儘管許多研究團隊設計了機器人可以避免障礙,這些機器人主要是通過逃避絆腳石來做到這一點。這種迴避策略通常使用傳感器來繪製環境和強大的計算機來計劃障礙物周圍的安全路徑。
“這種方法非常成功,例如Google的自動駕駛汽車”,主要研究作者伯克利分校的物理學家陳·李(Chen Li)說。有史以來最奇怪的機器人創建的這是給出的
李告訴《現場科學》:“但是,它確實有局限性。” “首先,當地形變得密集混亂時(縫隙變得比機器人尺寸相當,甚至比機器人大小)相當,這是一條無法擊中障礙物的清晰路徑,因為障礙物彼此之間太近。
取而代之的是,李和他的同事們想設計的機器人避免障礙,而是穿越了障礙。他們從圓盤蟑螂,長約2英寸(4.9厘米)。這些蟑螂通常生活在熱帶雨林的地板上,在那裡他們經常遇到各種各樣的混亂,例如草,灌木,樹葉,樹乾和蘑菇。
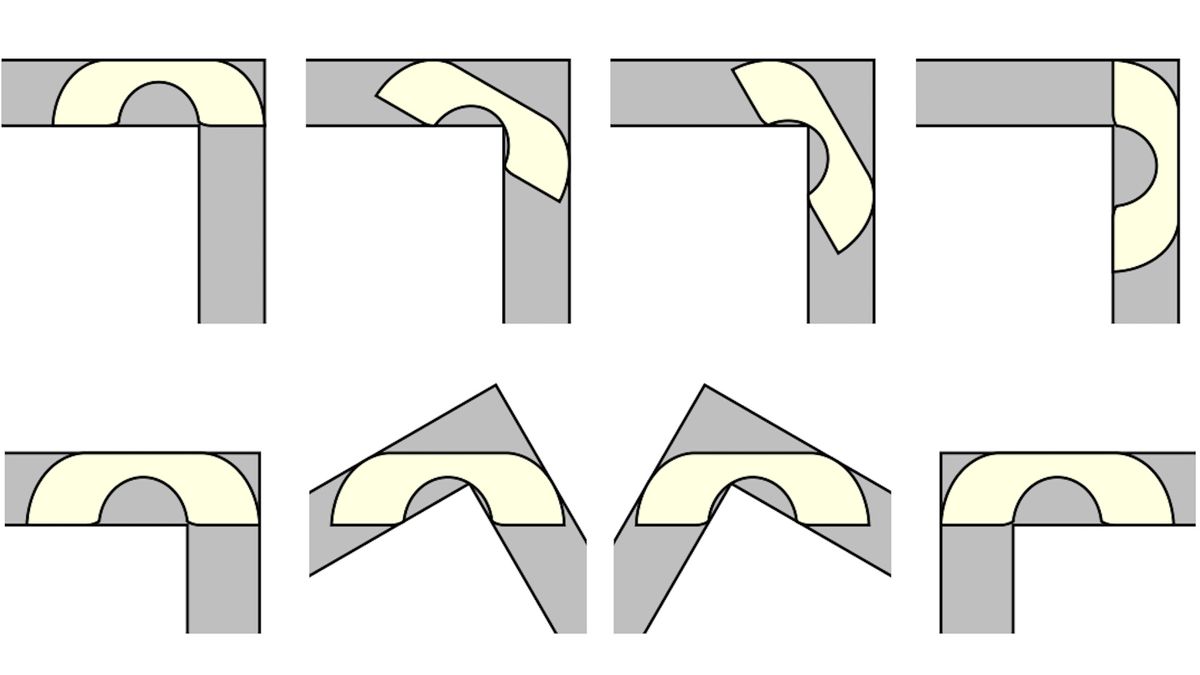
科學家使用高速攝像頭分析了蟑螂如何通過用卡片製成的緊密間隔,類似草的橫梁移動。在數百次奔跑的過程中,昆蟲通常在大約3秒內完成了障礙課程。儘管蟑螂有時會穿過光束或爬過它們,但幾乎一半的時間,但昆蟲通過滾動的身體繞過縫隙並使用腿部推開梁,迅速有效地滑過了梁。 [查看機器人蟑螂逃避障礙的視頻這是給出的
然後,研究人員將蟑螂裝有不同形狀的三個人造殼(類似於蟑螂的身體,平坦的橢圓形和平坦的矩形),以查看哪些因素影響昆蟲的運動。當膠殼使蟑螂減少圓形時,昆蟲的表現較低,並且操縱障礙,研究人員發現。
然後,科學家在類似的障礙物過程中測試了一個4英寸長的(10厘米)的六足機器人。當它有一個矩形的身體時,機器人只有19%的機會通過該路線,因為它經常被卡在草皮梁之間。但是,當它裝有蟑螂風格的圓形外殼時,它有93%的機會通過滾動橫梁來完成障礙物路線,就像真正的蟑螂一樣。研究人員說,此舉不涉及機器人編程或添加任何傳感器的任何更改,這是殼的自然結果。
李說:“機器人可以利用與環境的有效物理相互作用,甚至遍布密集的障礙。”
這項研究表明,身體形狀如何幫助動物和機器人穿越地形,就像許多鳥類和魚類的流線型身體形狀(並用飛機和潛艇模仿)有助於減少阻力。他說:“這就是為什麼我們將這個新概念命名為“ Terradyanig Sparlining”的原因。”
Terradyanig精簡可能對小型,廉價而言特別有用搜索和救援等應用程序中的機器人Li說,,精密耕作或軍事偵察,因為它允許機器人穿越瓦礫和植被等障礙,而不必添加更多的傳感器和計算機。
李說:“很可能有其他身體形狀適合其他目的,例如爬上障礙。”將來,研究人員計劃分析動物和機器人體形如何影響各種環境中的其他運動。
科學家在6月23日在網上詳細介紹了他們的生物煙與仿生學雜誌。
遵循現場科學@livescience,,,,Facebook和Google+。最初出版現場科學。