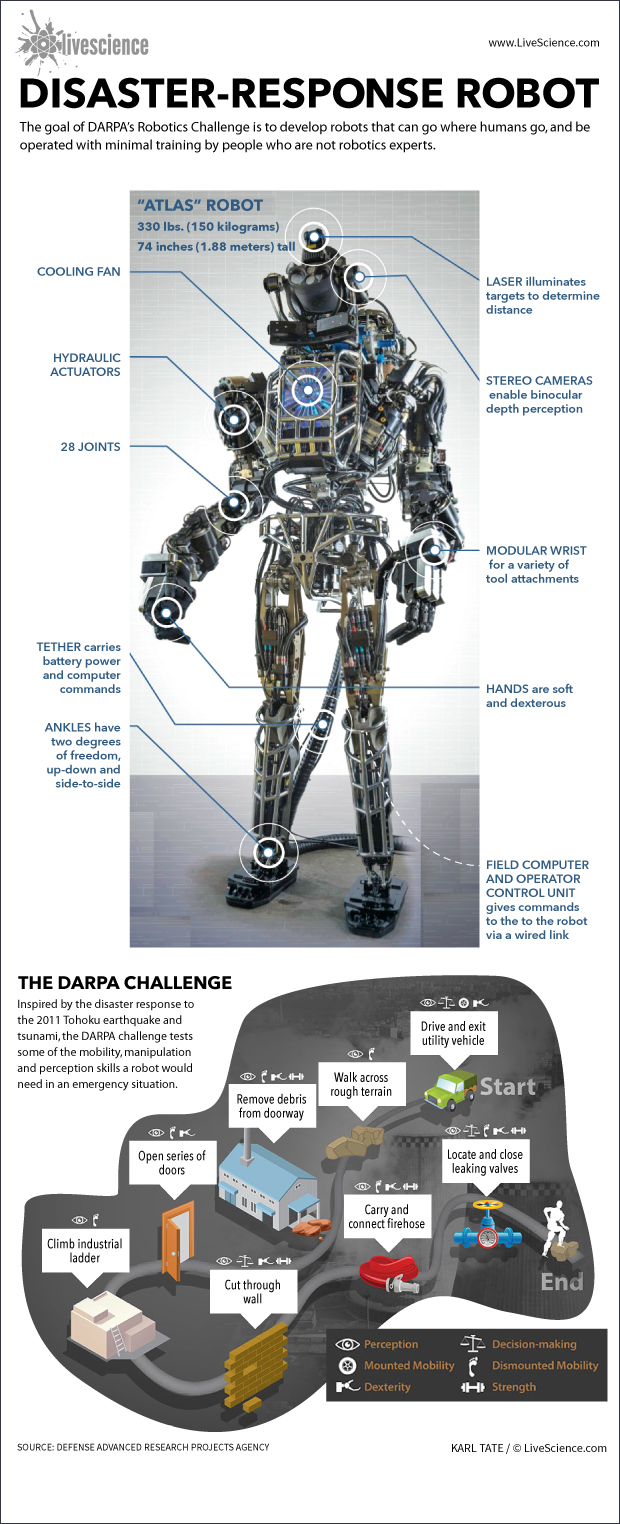
受到對2011年Tohoku地震和海嘯的災難反應的啟發,DARPA挑戰測試了機器人在緊急情況下機器人將需要的一些移動性,操縱和感知技能。
首先,機器人必須駕駛並退出一輛多功能車。然後,他們走過粗糙的地形,從門口清除碎屑。機器人打開了一系列的門,爬上工業梯子並切入牆壁。然後他們攜帶並連接消防。最後,機器人必須定位並關閉洩漏的閥門。
這些測試檢查機器人的感知,流動性,手動敏捷性,決策能力和力量。
要通過測試,機器人必須具有特定的功能。挑戰者之一的“地圖集”機器人重330磅。 (150公斤),高74英寸(1.88米)。
Atlas的體內有28個關節。四肢是液壓作用的。腳踝具有兩個自由度,可以向後移動以及上下移動。手腕是模塊化的,可以允許各種工具附件。手柔軟而靈巧。
在其頭上,Atlas攜帶立體攝像機以實現雙眼深度感知。 LIDAR系統會發射激光器以照亮目標以確定距離。
一個繫繩將地圖集鏈接到其電池電源和通信系統。操作員可以通過有線鏈接將命令發送到地圖集。