就像一個憤怒的忍者一樣,機器人空手道 - 木板木板,穿過乾牆,砸碎蘇打水罐,踢過垃圾桶,在馬薩諸塞州技術學院(MIT)的新視頻中阻塞了其路徑。
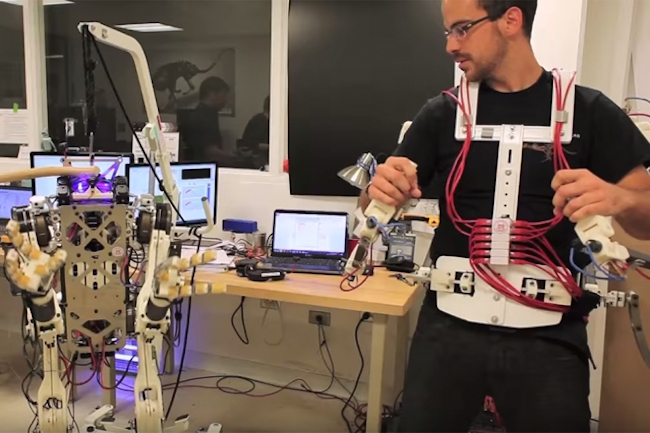
兩足機器並不是麻煩製造者。實際上,它實際上並不能控制自己的行為。一名距機器人幾英尺遠的研究人員可以藉助外骨骼- 一種機械帶,帶有扶手,研究人員腰部和上半身都戴著。
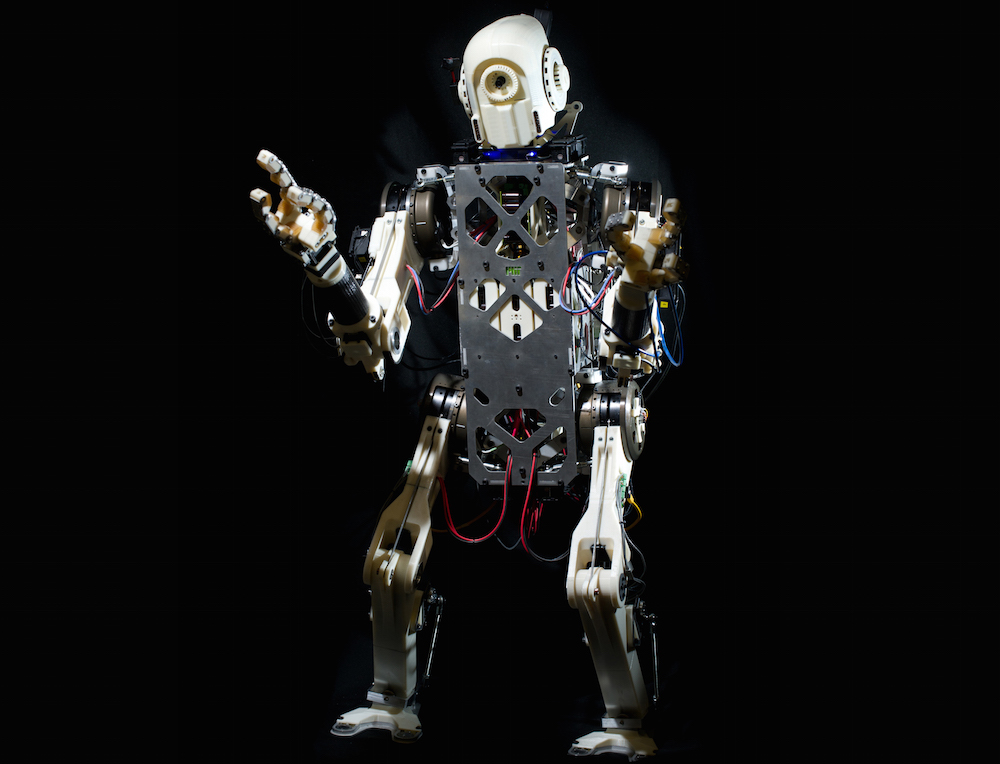
麻省理工學院的工程師開發了兩足動物的機器人,他們稱之為愛馬仕,並獲得了國防高級研究項目局(DARPA)的資助。而現在,研究人員正在開發人機界面,以使該技術在實驗室之外更有用。 [有史以來最奇怪的機器人創建的這是給出的
研究人員的外骨骼也被稱為平衡反饋界面,將人體的自然反射轉化為機器可以理解的語言。用類似人類的反射賦予機器人,例如,在拳打後向後搖晃,使其穩定 - 有助於機器人保持直立而不是掉落。
眾所周知,像愛馬仕這樣的兩足機器人很笨拙。冗長今年DARPA機器人挑戰的Blooper捲軸(剛果民主共和國),其中一組兩足機器人努力完成各種任務而不翻滾,這是足夠的證明。
但是,在麻省理工學院開發的平衡反饋界面可能會使雙足機器人保持直立所需的堅固性,並最終在現實世界中完成艱鉅的任務。希望這些所謂的“類人動物”機器人有一天能夠做對人類危險的工作 - 篩分碎屑據機械工程博士生Joao Ramos說,在地震或開火之後,正在研究MIT的新人機界面。 (他也是視頻中控制愛馬仕的人。)
“對於機器人而言,圖像的處理通常非常慢,因此機器人的時間很難及時反應,” Ramos在一份聲明中說。 “取而代之的是,我們想利用人類的自然反射和協調。一個例子是步行,這只是跌倒和抓住自己的過程。這對我們來說是毫不費力的,但要在機器人中進行編程以動態有效地進行機器人的挑戰。”
臨界點
步行,打孔,踢,揮舞著事物在空中:這些都是需要前進和平衡的任務的好例子。
為了幫助機器人掌握這些動作,研究人員首先必須找出100磅重的機器人的臨界點。為此,他們將負載傳感器放在機器人的兩個腳上。這些傳感器測量了地面上每隻腳施加的力,並用於計算機器人的壓力中心,或者在執行不同的任務時如何移動其重量。
然後,研究人員建立了人機界面的“人類”部分。研究人員建造了一個機動平台,控制機器人的人在該平台上。在控制中的人也穿著外觀外觀的外骨骼,適合腰部。外骨骼連接到電動平台,該平台又連接到計算機。
計算機接收有關機器人不斷變化的壓力中心的信息,並將此信息發送到平台的電動機。最後,電動機將力施加到基於外骨骼機器人的動作。換句話說,當機器人移動身體時,穿著外骨骼的人被撞倒了。
“如果機器人向前走得太遠,界面將將操作員朝相反的方向推動,以傳達機器人有跌落的危險,”在新界面上工作的博士生艾伯特·王(Albert Wang)在一份聲明中說。
到目前為止,該界面使該機器人穿過乾牆,並從錘子上屈服於軀幹,並在其軀幹上重複擊中機器人。接下來,研究人員希望繼續進行更具挑戰性的任務,例如讓機器人擺動斧頭並打開一個彈簧的門。根據王的說法,這些是機器人完成而不落下的任務。但是,現在,機器人可以從反射準備就緒的人提供幫助下完成這些工作,從而更容易。
關注伊麗莎白·巴勒莫 @Techepalermo。遵循現場科學@livescience,,,,Facebook和Google+。原始文章現場科學。